
![]()

LOCK Sub-Topic



当多核的引擎轰鸣作响,数据在处理器与内存之间奔流不息,内核的并行优化便成为性能极限的试金石。锁的设计与选择,不仅仅是代码的选择题,更是平衡公平与效率的精密算计。自信号量(SEM)到读写锁(RWLOCK),每一把锁都试图在吞吐与等待之间划下分界线。可在高并发的洪流面前,临界区的每一刻停留都可能成为瓶颈,锁的粒度、持有时长以及争用概率,牵一发而动全身。正因如此,内核开发者在锁机制上不断求新,力图将锁的影子缩至最小,只为释放更多并行潜能。
但锁从来不是唯一的答案。随着硬件并发能力的飞跃,无锁(lock-free)与原子操作(atomic)的理念悄然崛起。它们主张用最小化的同步原语、精巧的内存屏障和巧妙的数据结构,实现线程间的协作与竞争。无锁算法如同高速公路上的快车道,让数据在多核间自由穿梭,无需等待、无须让步。RCU、SEQLOCK、PERCPU 等机制,都是在锁之外开辟的并发新天地。每一次锁的省略,都是性能的飞跃,也是对内核并发优化边界的极限挑战。
BiscuitOS 提供了并行优化专题,系统性地收集和梳理 Linux 内核中各种锁与无锁机制,从经典的互斥锁、自旋锁,到先进的 RCU、SEQLOCK、PERCPU、原子操作等,并结合实际开发案例,边讲解原理,边动手实践。通过理论与实践的结合,帮助开发者不仅看懂内核并行优化的“是什么”,更能真正体会到“为什么”以及“怎么用”。希望这个专题能成为开发者深入理解并行优化的桥梁,让每一位开发者都能更快、更容易地掌握内核并发的精髓,把握性能与安全的平衡,从而在实际工作里,游刃有余地驾驭多核并行的浪潮.
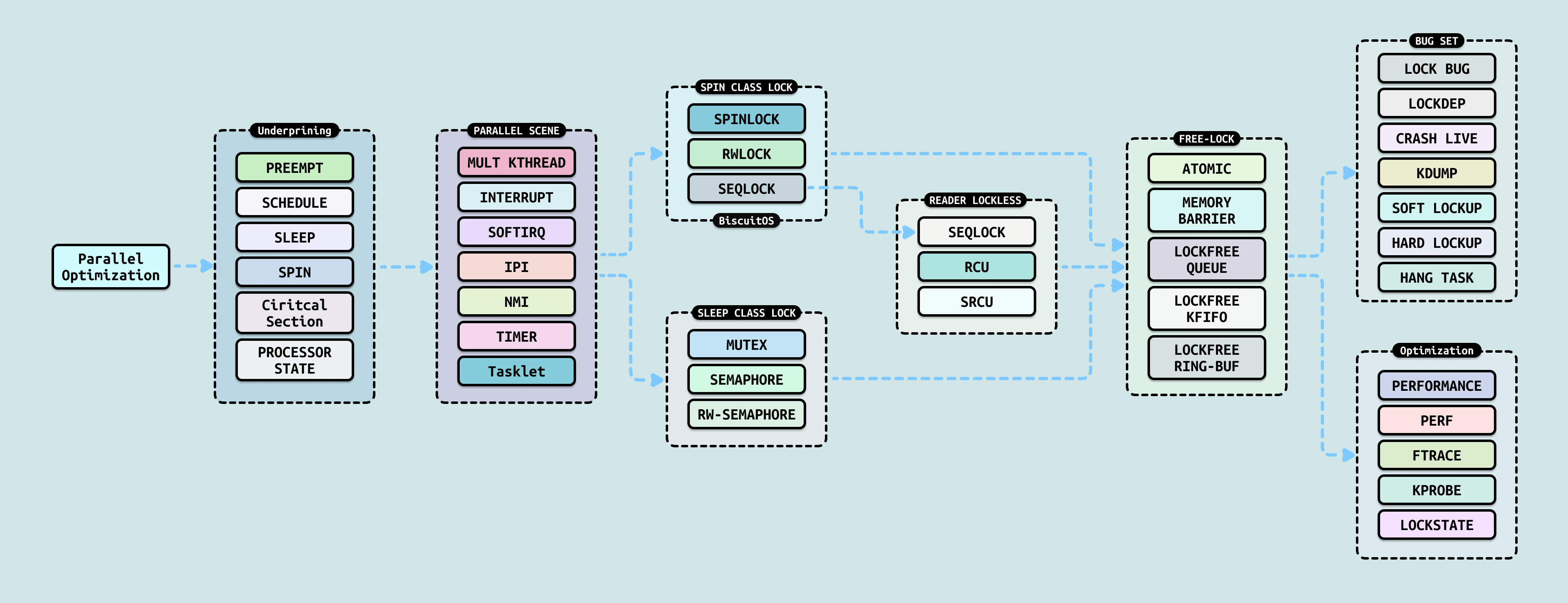
上图勾勒出了内核并行优化专题的学习路径,它不仅梳理了知识脉络,也为大家提供了一条循序渐进、层层递进的学习通道。相比于零散查找、盲目摸索,按照这条路径系统学习,能够帮助你更高效地构建知识体系,快速理清各种锁与无锁机制之间的联系与区别。无论你是初学者还是有经验的开发者,只要沿着这条路线踏实前进,都能在最短的时间内掌握内核并行优化的核心原理与实践方法,实现从入门到精通的飞跃. 具体路径如下:
- 学习抢占: 了解操作系统中的抢占机制,理解为什么内核要支持抢占,以及抢占和并发之间的关系,为并行优化打下基础
- 学习调度/睡眠/自旋 掌握内核调度的基本原理,区分线程的睡眠与自旋状态,搞清楚对并行的影响
- 学习临界区: 认识临界区的定义和作用,学习如何用锁或其他机制保护共享资源,避免竞态条件和数据不一致问题
- 学习并发场景: 结合实际案例,分析内核中常见的并发场景,理解各种并发问题产生的根源,为后续锁机制的学习做好铺垫
- 学习进程/现成状态: 熟悉进程和线程在内核中的多种状态,理解状态切换的时机及其对并发控制的影响
- 学习自旋性锁: 系统学习自旋锁及相关变种(如读写自旋锁),掌握其使用场景、优缺点及实现原理
- 学习可睡眠锁: 深入了解互斥锁、信号量等可睡眠锁的原理和应用,学会如何在合适场景下选择和使用它们
- 学习读无锁: 认识如 RCU、SEQLOCK 等读操作无锁机制,掌握其原理、优势和适用场景,体会无锁并发的高效与精妙
- 学习无锁: 学习真正意义上的 lock-free 数据结构与算法,掌握原子操作和内存屏障的使用,理解无锁并发的挑战与边界
- 学习锁 BUG/调试: 了解常见的锁相关 BUG(死锁、优先级反转等)及其排查方法,掌握内核锁调试工具与技巧
- 学习锁性能分析: 学习如何分析和评估锁的性能影响,掌握常用的性能分析工具和优化思路,为实际项目中的并发优化提供支撑
- 学习用户进程内的锁: 了解在单一用户进程内部实现线程安全的各种锁机制,如互斥锁、条件变量、自旋锁等,掌握其使用方法和适用场景,提升多线程程序的并发能力和稳定性
- 学习用户进程间的锁: 学习用于不同用户进程之间同步和数据保护的锁机制,如文件锁、信号量、共享内存锁等,理解其原理、实现方式及在多进程并发中的应用,确保进程间协作的正确与高效
坚持系统地学习并掌握这些内容,也许过程并不轻松,但收获一定超乎想象。等你走完这条学习路径,不仅会对 Linux 内核底层的并发与同步机制有深入的理解,更能够从容应对实际开发中的各种并行挑战。无论是阅读源码、分析问题,还是学习新技术、优化现有系统,这些知识都会成为你不可替代的底层武器。希望你能坚持到底,完成这趟并行优化之旅,为自己打开更广阔的技术世界,迎接更高层次的成长与挑战。

并行(Parallelism) 是在计算机系统中将多个任务或者操作同时执行的一种处理方式。它的本质是通过硬件(如多核处理器、多线程等)或软件(如多进程、多线程编程)手段,将原本可以同时进行的多个独立任务分配到多个处理单元上,让它们在同一时刻协同推进。与之相对的是串行(Serialism),串行处理要求所有任务依次、一个接一个地执行,当前任务未完成时,后续任务必须等待,这对于任务数量庞大或处理需求高的场景会造成资源浪费和响应延迟。并行与串行的最大区别在于,前者强调任务的”同时进行”,充分利用多核CPU、硬件加速器等计算资源,而后者则强调任务的”依次进行”,在单核、资源有限时保证简单和确定性。举例来说,单线程下载和解压文件属于串行操作,而多个线程同时下载、解压和校验文件,则属于并行执行。
引入并行的核心动因在于提升系统的整体吞吐能力和响应速度,充分释放现代计算硬件的潜能。当单核处理器的主频提升遇到物理极限后,多核、多线程成为硬件发展的主流趋势。此时,如果依旧采用串行模式,许多计算资源将被闲置,无法发挥应有的效能。通过并行化,系统可以同时处理多个任务,比如多个用户请求、不同的数据处理流程或者密集计算任务,从而缩短任务总耗时、提升用户体验。并行的引入也带来了架构和编程模型的调整: 开发者需要考虑任务划分、数据分割、资源竞争和同步等问题,适配并发模型,防止竞态条件、死锁等并发 Bug 的出现。同时,操作系统、编译器、底层库也需要支持高效的任务调度、负载均衡和数据一致性保障。总的来说,并行不仅显著提升了计算效率,更促使开发者转变思路,从”线性执行”迈向”协同推进”,为现代软件性能优化和创新应用奠定了坚实基础

抢占(Preemption) 是一种允许操作系统在任何时刻强制中断当前正在运行的任务(如进程或线程),并将 CPU 控制权交给另一个更高优先级任务的机制。通俗来说,就是当系统发现有更重要或者更紧急的任务需要处理时,可以”打断” 当前的任务,让高优先级任务立即获得执行机会。抢占的核心意义在于提升系统的响应速度和公平性,避免某个任务长期占用处理器资源而导致其他任务”饿死”或响应迟缓。在多用户、多任务的现代计算环境中,任务的优先级和实时性需求各不相同,如果没有抢占,低优先级或计算密集型任务有可能长期霸占 CPU,导致关键任务无法及时响应。因此,支持抢占不仅能够实现更灵活的调度策略,还能保障实时系统、交互式应用的及时性和用户体验,使系统能够快速响应外部事件和高优先级请求
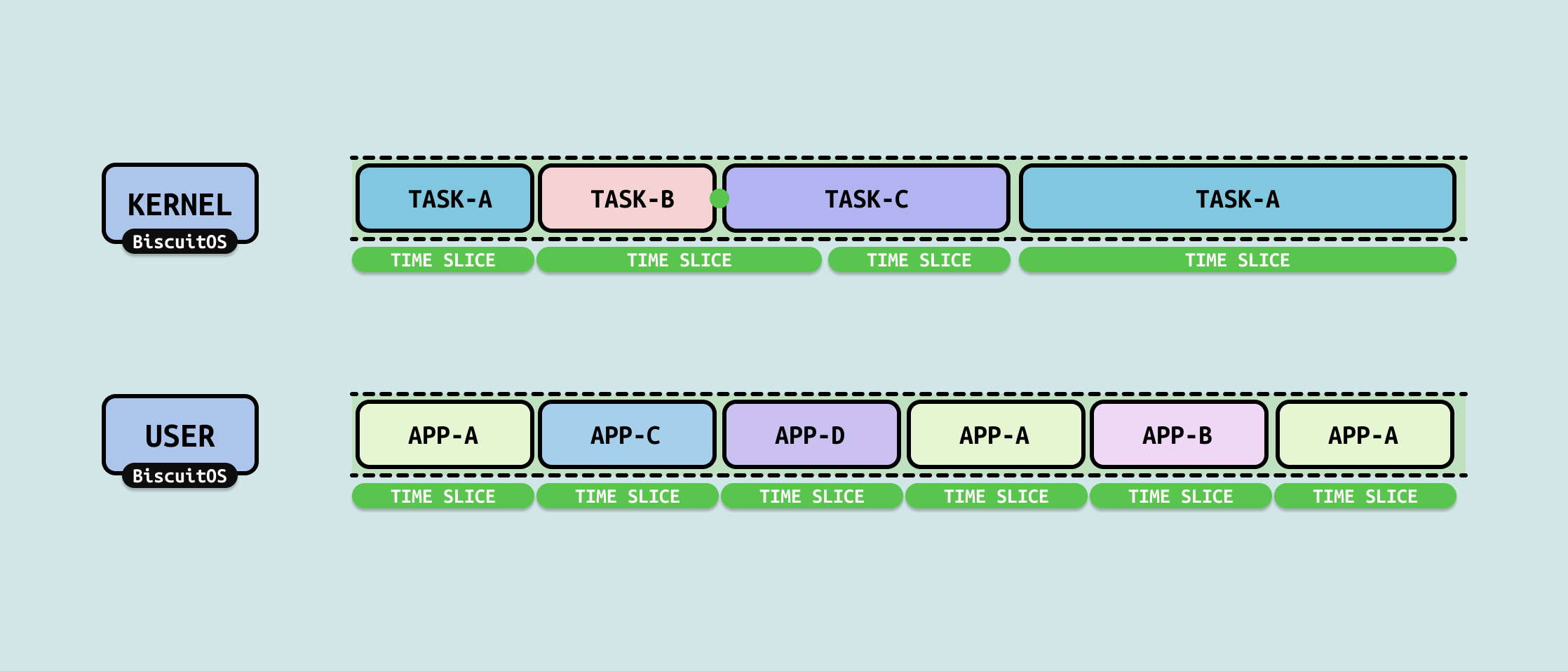
在支持抢占的系统中,无论是用户进程还是内核线程,只要其时间片用尽,操作系统调度器都可以立即将其挂起,切换到其他可运行的任务。尤其是在多核环境下,抢占式调度能够确保高优先级任务第一时间获得执行权,从而最大程度发挥硬件并行能力。而在不支持抢占的系统(如早期某些嵌入式或简单单任务系统),任务调度通常采取合作式方式,即只有当当前任务主动让出 CPU(如主动调用 yield 或进入阻塞状态)时,系统才会切换到其他任务。这意味着如果某个任务迟迟不主动放弃 CPU,其他任务就会被”饿死”,极大影响系统的响应性和公平性。对于内核线程而言,抢占同样重要: 内核抢占能力的引入,意味着即使是在内核态执行的长期任务,也能被更高优先级的内核线程或中断打断,减少内核层面的”卡死”现象,提升系统整体的并发和实时处理能力
抢占机制对并行计算学习具有重要的启发和推动作用。首先,抢占为操作系统调度提供了基本保证,使得多个并发任务能够被合理、公平地安排在处理器上执行,这为并行计算环境下的资源利用和任务分配奠定了基础。其次,抢占机制暴露了众多并发与同步问题,比如数据竞争、临界区保护、死锁等,这些正是并行优化和多核系统设计中必须重点关注和解决的核心难题。学习并理解抢占,不仅有助于开发者在高并发场景下设计出高效、健壮的同步机制,还能帮助大家深刻体会到调度策略、优先级继承、抢占延迟等底层机制对系统性能和响应性的直接影响。更进一步,只有深入掌握抢占背后的原理,才能在多核、多线程、实时等复杂计算场景下,灵活运用锁、无锁、原子操作等优化手段,真正释放并行计算的全部潜力。因此,抢占既是并行计算学习的基础内容,也是理解操作系统底层行为与并发优化的关键一环。

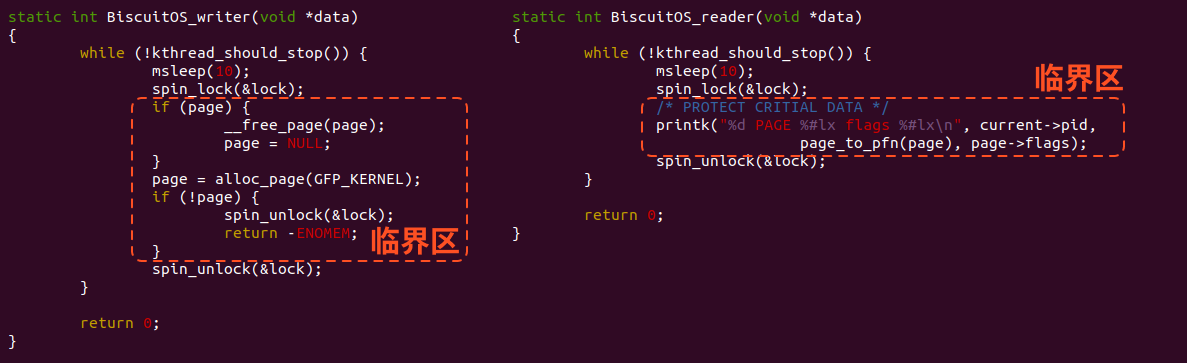
临界区(Critical Section) 是指在多线程或多进程并发场景下,程序中一段需要独占访问共享资源(如全局变量、链表、设备等)的代码区域。换句话说,临界区内涉及对共享数据的读写操作,如果同一时刻有多个任务同时进入临界区并对同一资源进行操作,就可能引发数据竞争、数据不一致甚至系统崩溃。因此,保护临界区是并发程序设计的核心问题之一。常见的保护方式包括加锁(如互斥锁、自旋锁)、信号量、关闭中断等手段,目的是确保同一时刻只有一个执行单元(线程或进程)能够进入临界区,从而保证共享资源的安全访问。临界区并不是越短越好、越少越好,而是要根据实际业务和性能需求进行合理划分和控制。过大的临界区会导致并发度降低,过小或过多则会加重同步开销。掌握临界区的概念与管理,是理解多核并行优化、锁机制设计、无锁技术实现的基础。
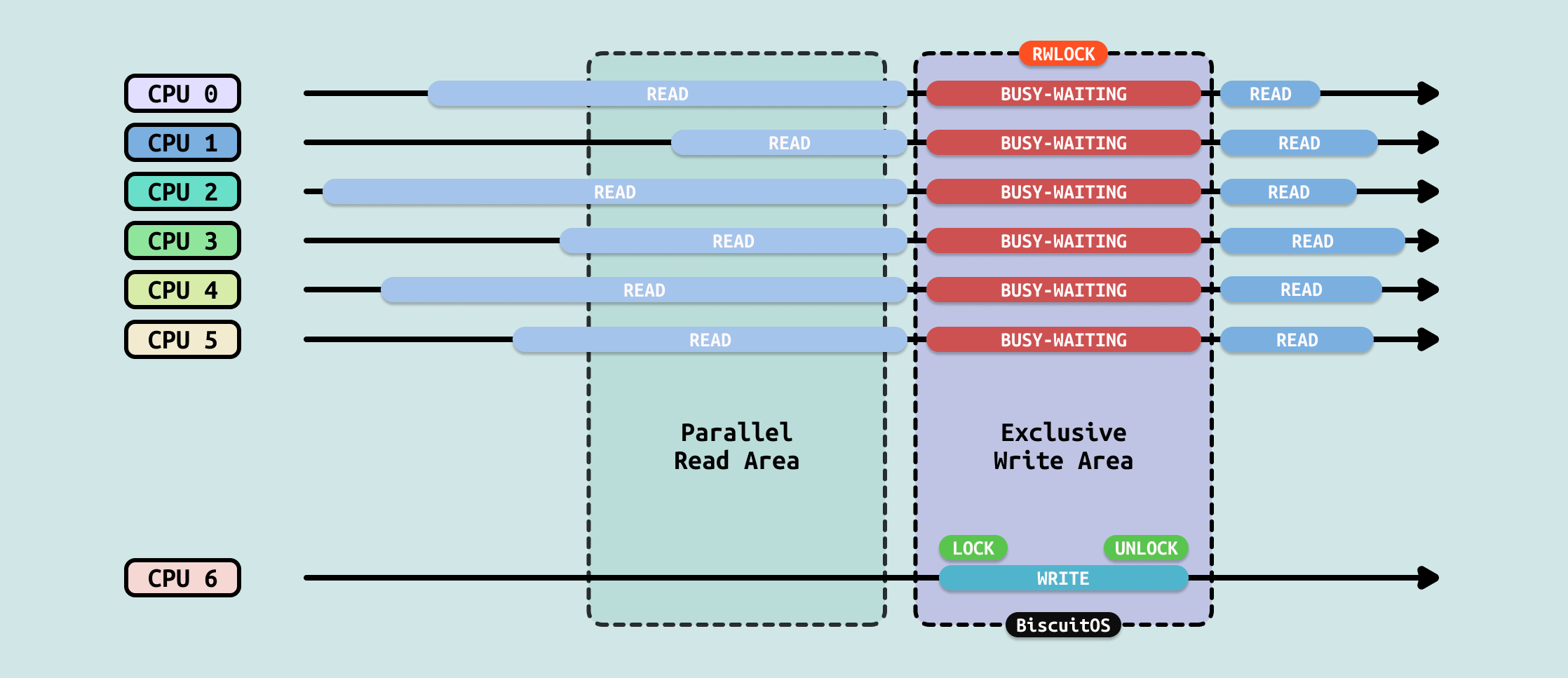
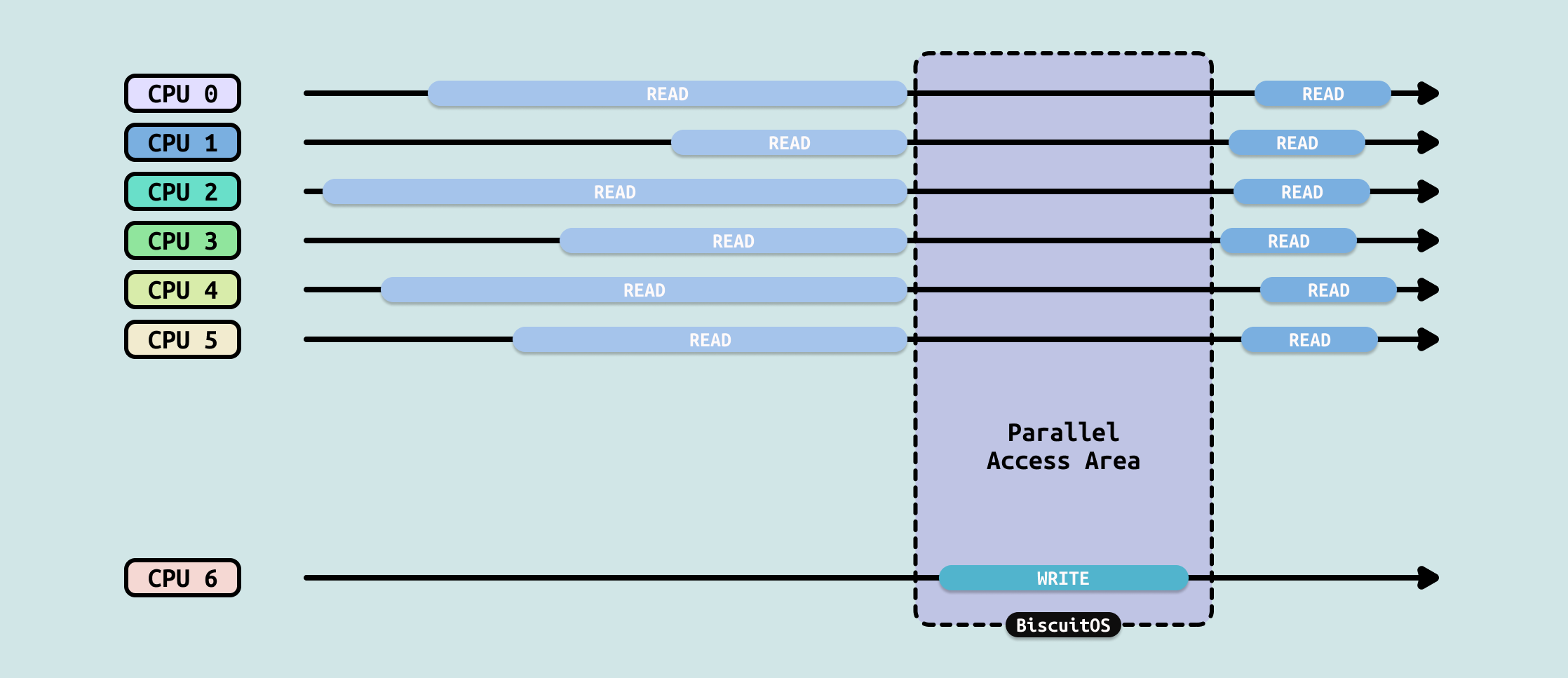
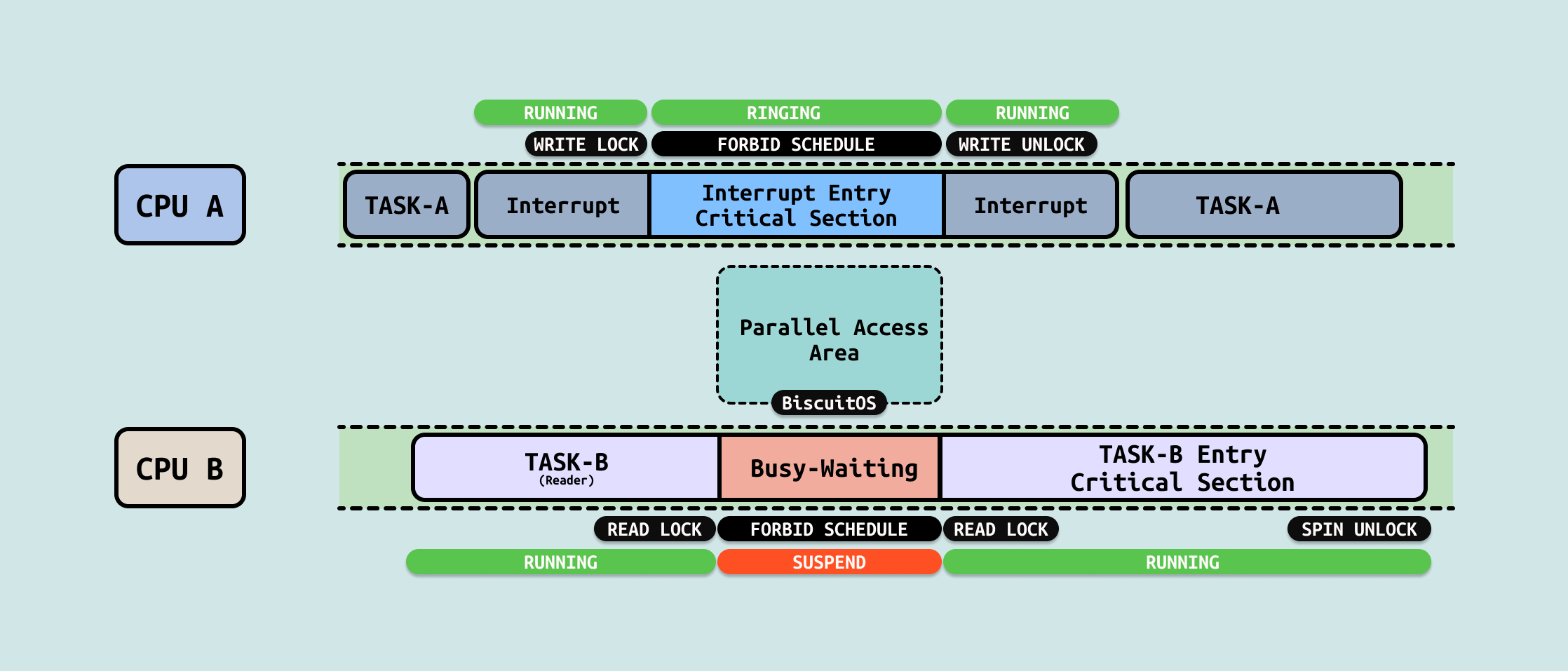
在实际开发中,临界区常常被进一步细分为“读临界区”和“写临界区”,以便于根据操作的不同特性采用更为高效的并发控制策略。读临界区指的是在该区域内只对共享资源进行读取操作,不涉及数据的修改。由于多个线程同时读取同一份数据通常不会引发数据不一致问题,因此读临界区可以允许多个线程并发进入,这就是读写锁(Read-Write Lock)等机制能够提升并行度的原理。与之相对,写临界区则涉及对共享资源的修改操作。出于对数据一致性的保护,写临界区通常要求同一时刻只有一个线程能够进入,同时为了避免读操作读取到不一致的数据,写操作期间也会阻止其他线程进入读临界区。合理区分读临界区和写临界区,并采用合适的同步机制,比如读写锁,可以显著提升系统在高并发读多写少场景下的整体性能,有效减少锁竞争和等待时间。
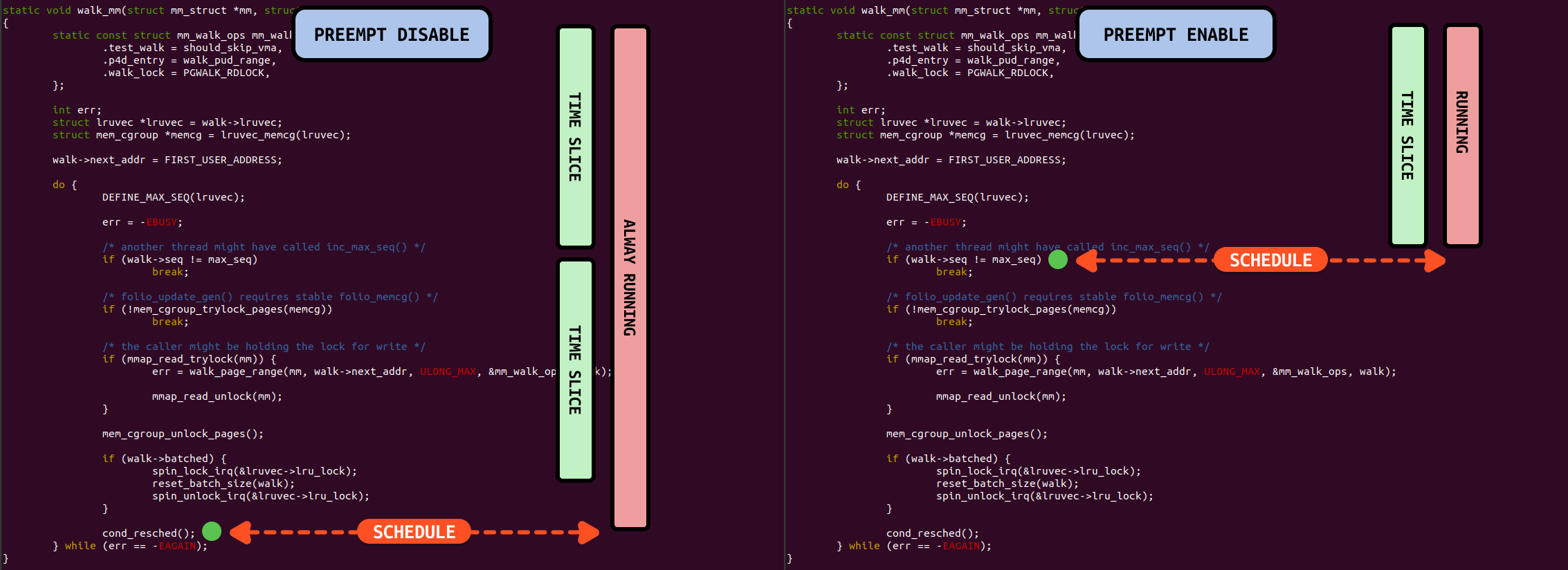
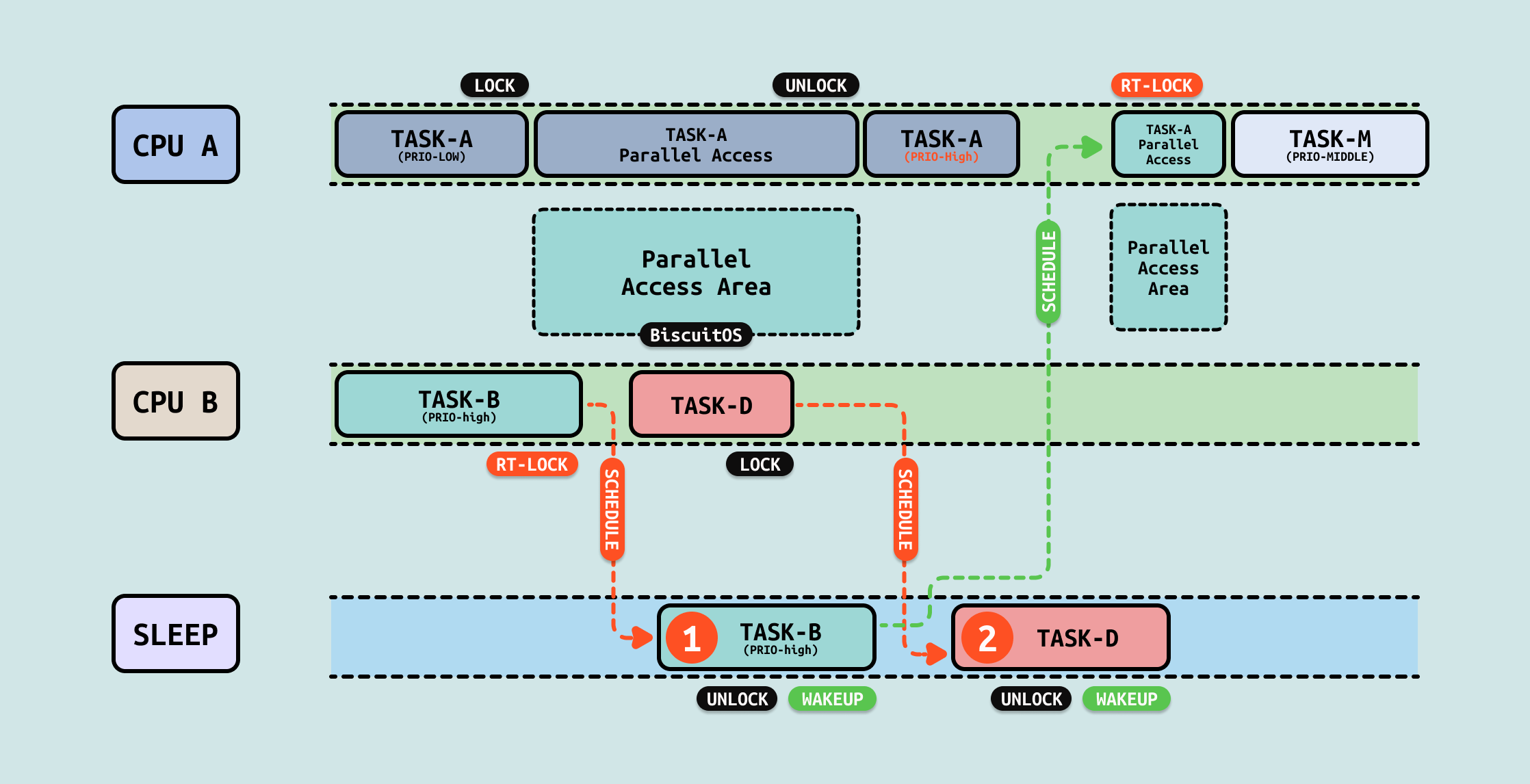
在临界区内部,程序的行为与外部调度机制密切相关,如何处理抢占、睡眠及中断等事件,是设计高效并发系统必须深入考虑的问题。首先,允许在临界区内发生抢占(即当前线程被调度器主动切换出去),可能导致另一个线程也进入临界区,从而引发并发冲突。因此,对于某些要求极高原子性的临界区,内核会选择在进入时临时禁止抢占,这样可以确保当前线程在离开临界区前不会被操作系统强行调度出去。其次,如果临界区内可以发生睡眠(例如遇到阻塞操作或主动让出 CPU),那么在持有锁时睡眠可能导致”锁被长期占用”,造成死锁或优先级反转等问题,因此许多自旋锁等同步机制都要求”临界区内不能睡眠”。此外,临界区还可能受到中断的影响,例如在中断处理程序中访问共享资源时,必须防止多个中断上下文同时进入临界区,这时可以通过”禁止本地中断”来保护临界区。总之,临界区内对抢占、睡眠、中断等行为的控制策略,不仅影响系统的安全性,还直接决定了并行度和性能优化的上限。理解这些细节,是深入掌握并发原理和高效编程的关键环节

在 Linux 内核中,并发现象无处不在,几乎所有涉及多任务、多核处理的场景都可能发生并发。例如,多个进程或线程同时访问同一块文件、网络缓冲区或设备驱动时,都会引发对共享资源的竞争。中断处理程序和内核线程也可能在不同 CPU 上同时操作同一数据结构,如链表、队列、计数器等。此外,内核模块的加载与卸载、定时器回调、软中断与工作队列的执行等,也都可能导致多个执行流并发访问内核对象。正因为这些复杂的并发场景,如何合理管理同步与互斥,保证数据一致性和系统稳定性,成为内核开发中不可回避的重要课题. 内核中并发场景如下:
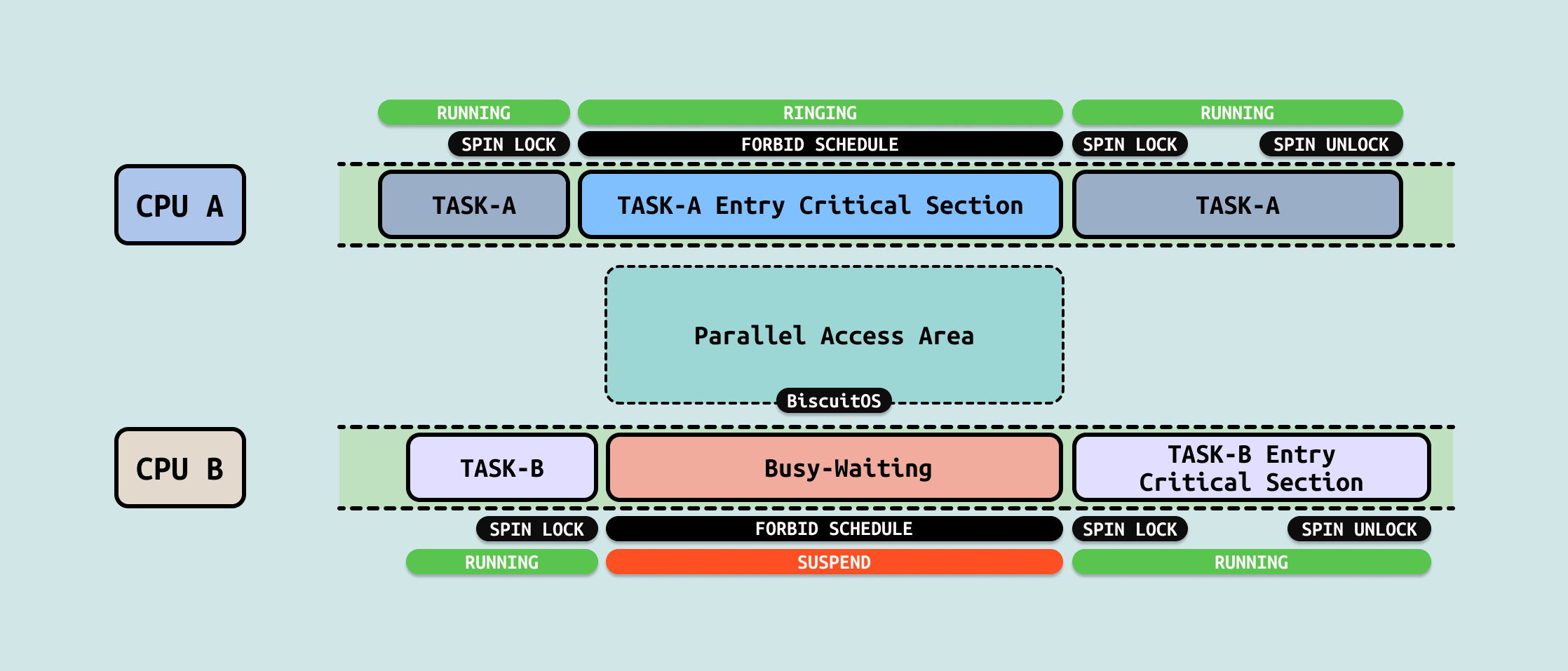
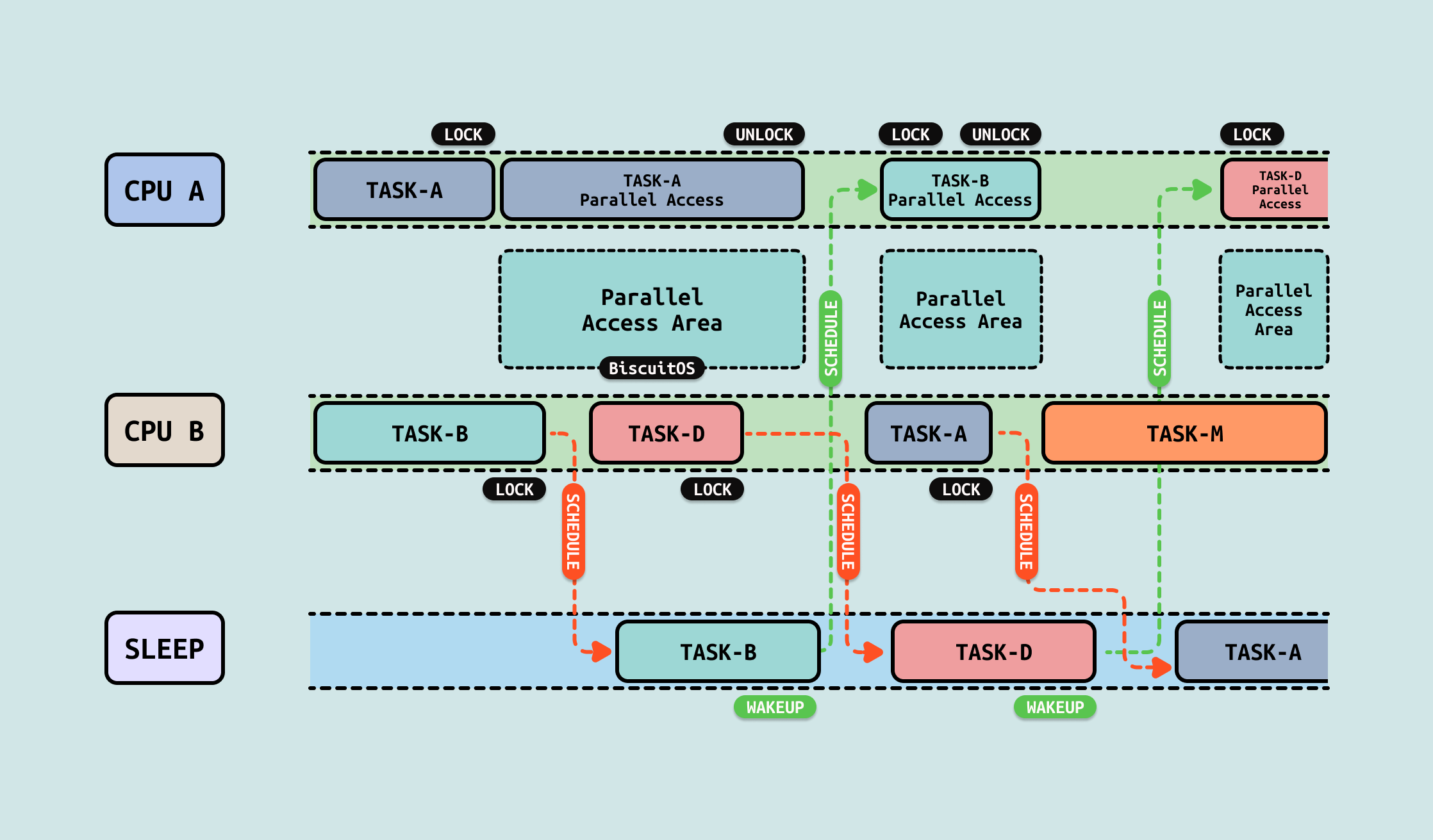
内核多线程并发场景: 在内核里存在这类并发场景,内核同时创建多个内核线程处理任务,并且这些内核线程都会访问同一块数据,当多个内核线程同时访问这块数据时,并产生了并发访问的场景. 此时可以使用 spin lock 将并发资源保护起来, 谁先抢到锁并上锁(LOCK),就可以进入临界区. 其它没有抢到锁的内核线程只能在所外忙等,直到加锁的线程从临界区出来,并释放锁(UNLOCK), 其他想进入临界区的线程继续强锁,直到抢到锁,否则一直等待. 该场景适合不像被调度访问并发资源的场景.
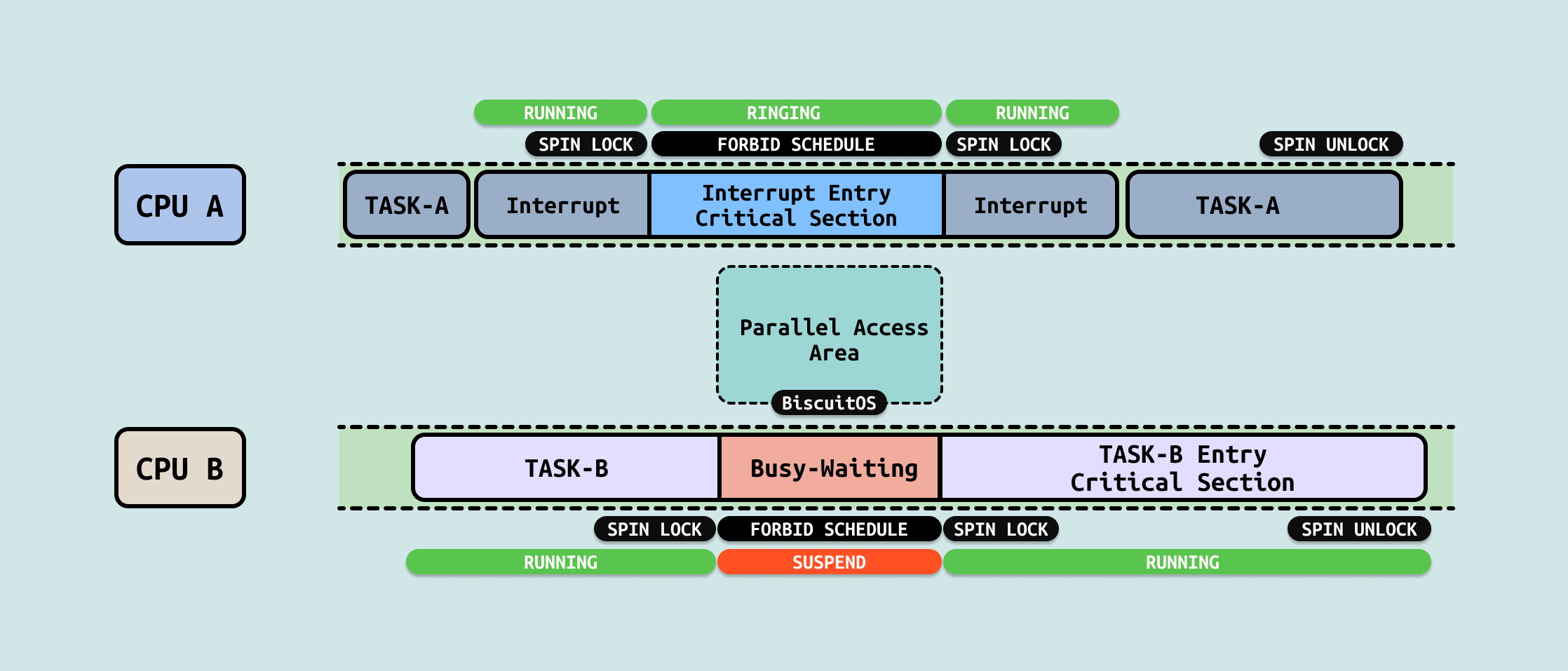
中断并发场景: 中断(Interrupt) 可以打断 CPU 上正在运行的任务,并运行中断处理函数(Interrupt handler), 由于中断处理函数的上下文必须运行简短代码,不能睡眠(被调度). 当中断处理函数里与其他内核线程存在访问并发资源时,需要加 spin lock 锁,并且保证中断处理函数因抢不到 spin lock 的等时间不能过长,否则影响系统的响应速度.
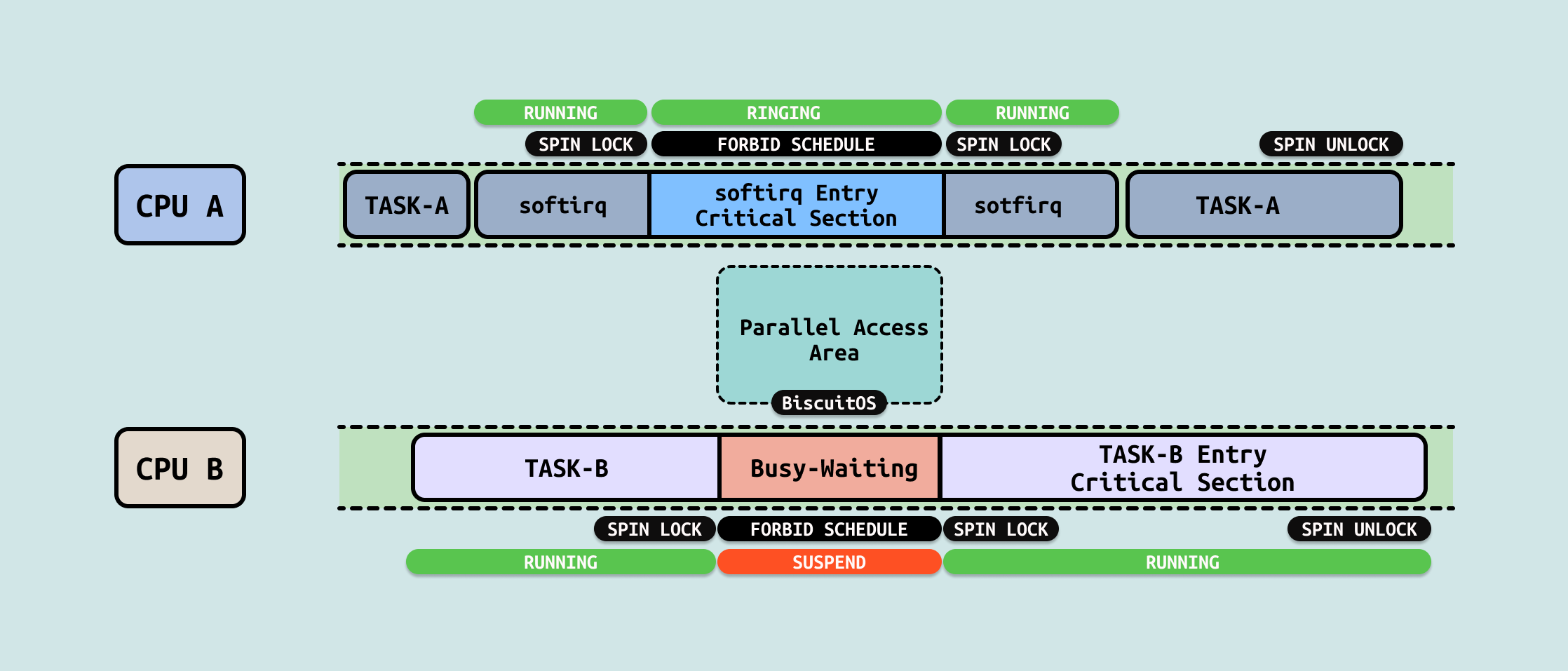
软中断(softirq)场景: 当中断处理函数任务很耗时时,将耗时的事从中断处理函数剥离出来,放到软中断(Softirq) 中进行处理,这样中断处理函数只做快速立即响应的任务. Softirq 的上下文(运行时机)可能在中断上下文,也可能在 ksoftirq 内核线程上下文. 如果 softirq 上下文里与其他内核线程存在并发访问共享资源,并且 softirq 不能睡眠,因此需要加 spin lock 锁进行并发保护.
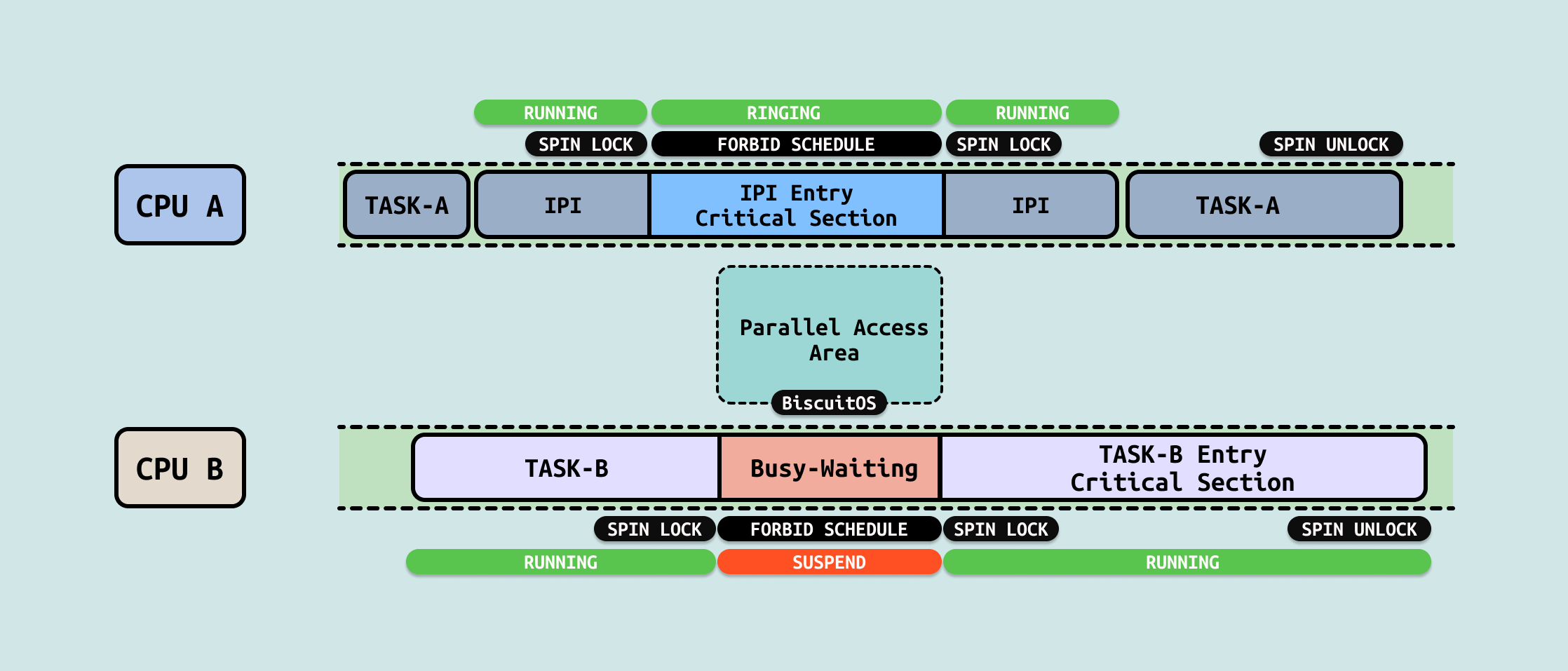
IPI 场景: IPI 是多核处理器中,一个 CPU 向另外一个/多个 CPU 发送的中断信号, 用于协调多核间的任务执行、缓存同步或状态更新. IPI 会打断指定 CPU 上正在运行的任务,并运行 IPI 处理函数,此时需要尽快执行完毕,以免影响系统响应速度. 同理 IPI 处理函数与其他内核线程存在并发访问共享资源,并且 IPI 不能睡眠,也不能被本地中断屏蔽,因此需要加 spin lock 锁进行并发保护,并且在拿不到 spin lock 的时候不能等.
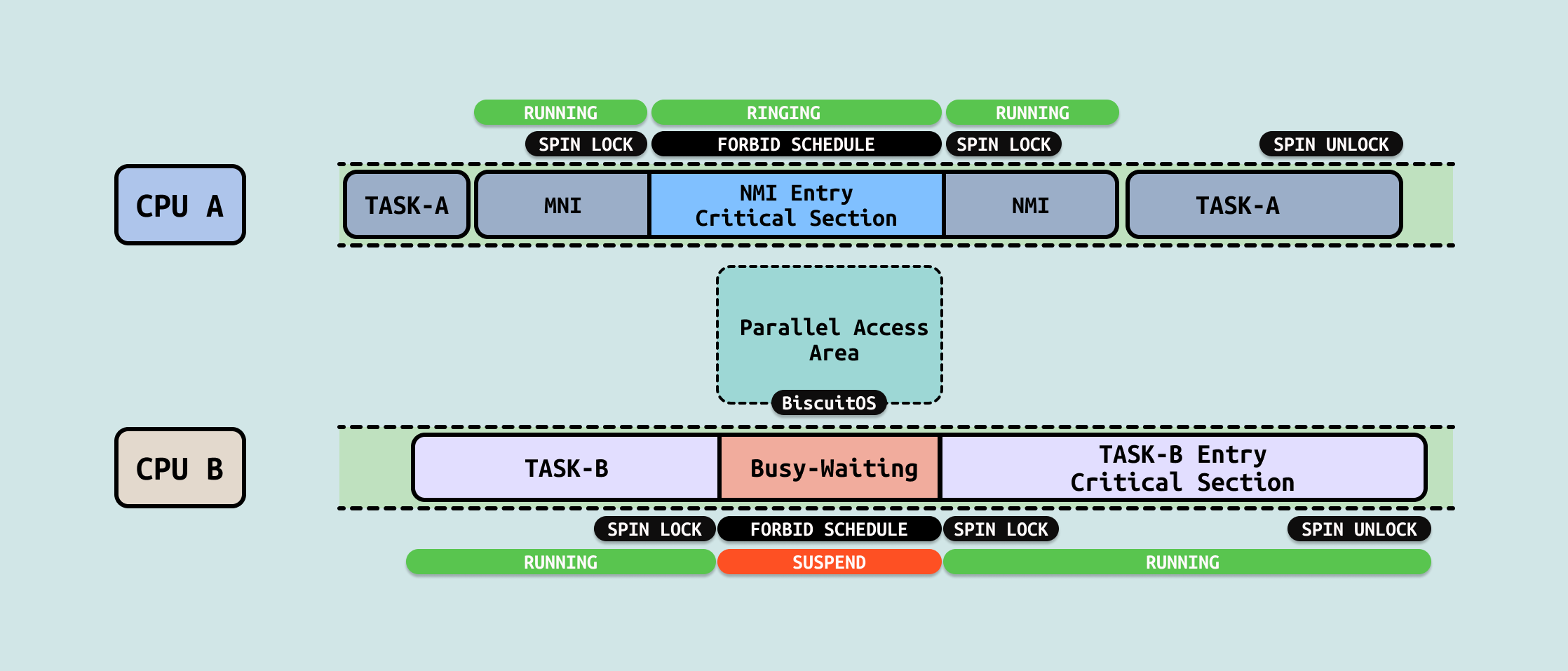
NMI 场景: NMI(Non-Maskable Interrupt) 是一种特殊的中断类型,优先级高于所有可屏蔽中断,即使 CPU 处于中断禁用状态,NMI 也能被立即响应. 它是系统处理致命错误或紧急事件的最后防线. NMI 会打断 CPU 上正在运行的任务,并运行 NMI 中断处理函数,此时需要尽快执行完毕,以免影响系统响应速度. 同理 NMI 处理函数与其他内核线程存在并发访问共享资源,并且 NMI 处理函数不能睡眠,也不能被本地中断屏蔽,因此需要加 spin lock 锁进行并发保护,并且在拿不到 spin lock 的时候不能等.
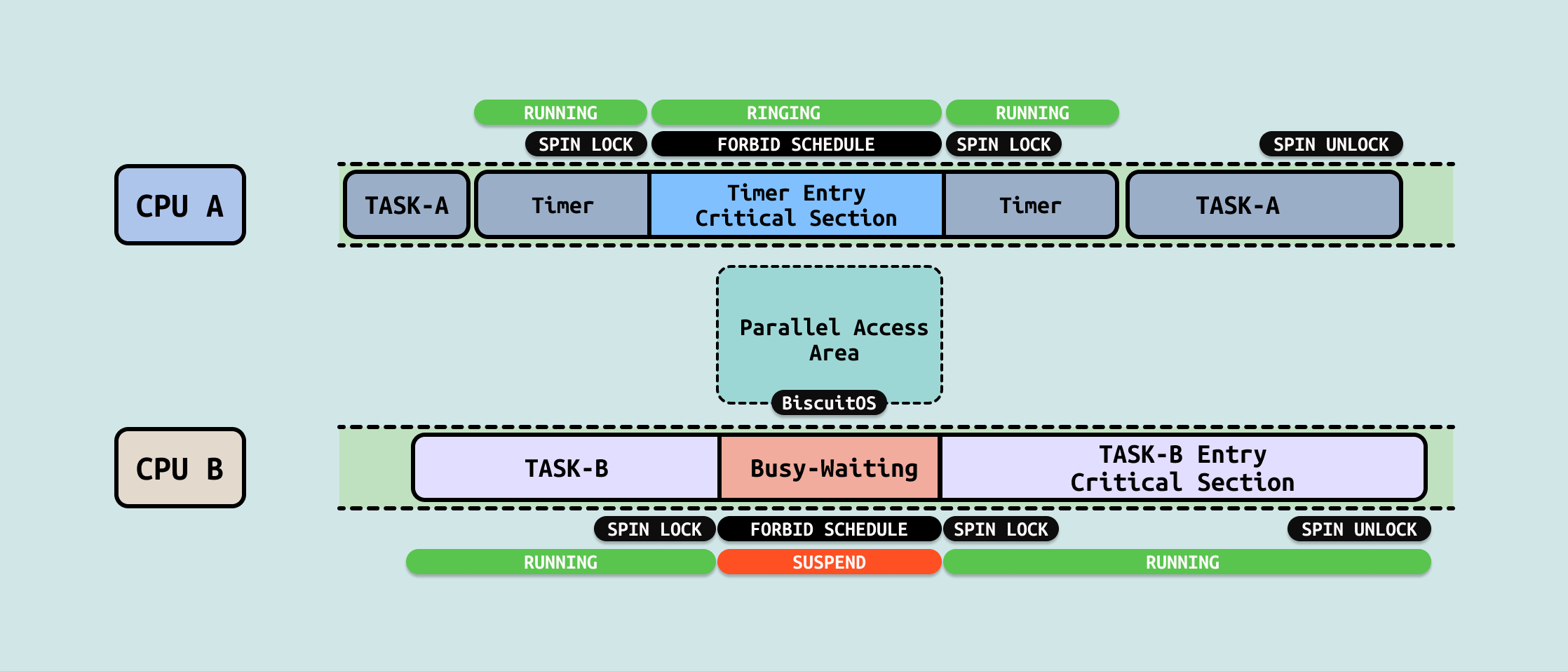
定时器中断场景: 定时器中断用于周期性处理指定任务的中断,Timer 中断会打断 CPU 上正在运行的任务,并运行定时器中断处理函数,此时需要尽快执行完毕,以免影响系统响应速度. 同理定时器处理函数与其他内核线程存在并发访问共享资源,并且定时器处理函数不能睡眠,因此需要加 spin lock 锁进行并发保护,并且在拿不到 spin lock 的时候不能等太久.
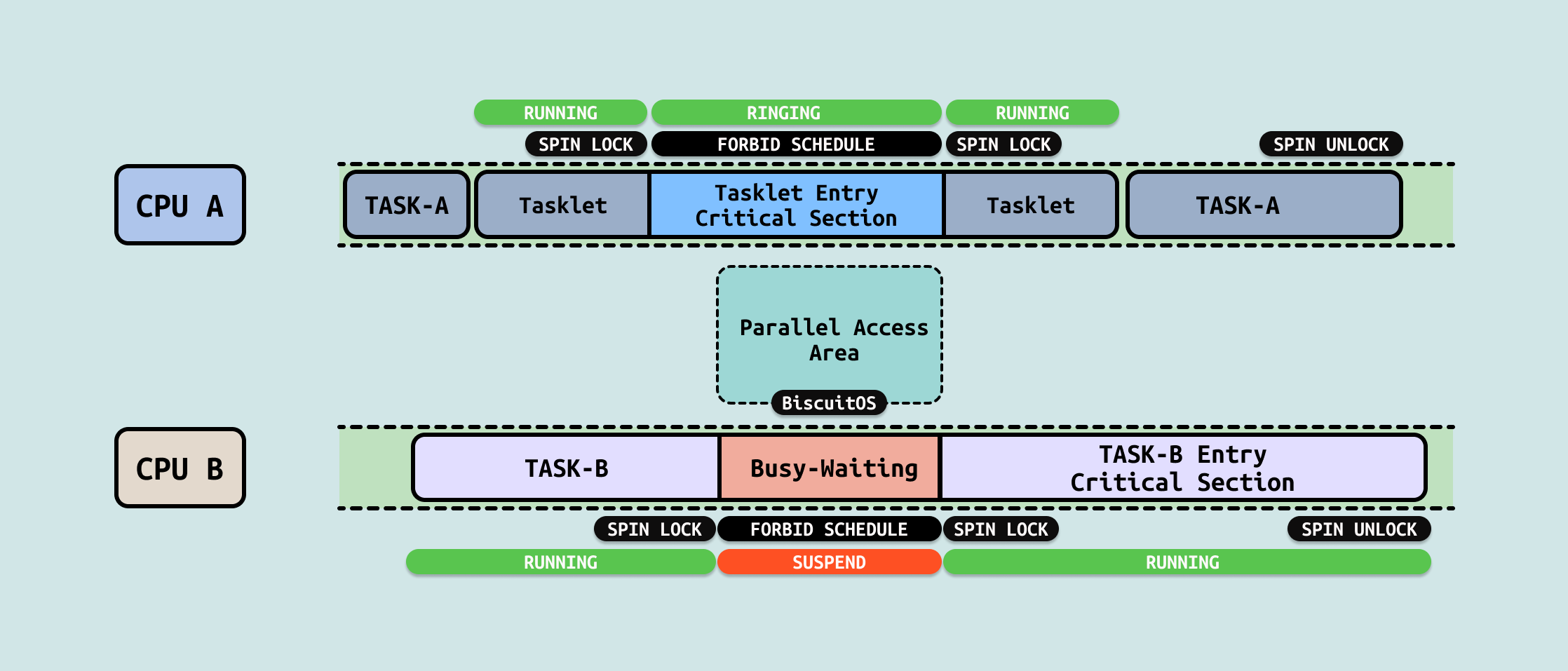
Tasklet 场景: 当中断处理函数任务很耗时时,将耗时的事从中断处理函数剥离出来,放到中断下半部(Tasklet) 中进行处理,这样中断处理函数只做快速立即响应的任务. Tasklet 的上下文(运行时机)是 Softirq. 如果 Tasklet 上下文里与其他内核线程存在并发访问共享资源,并且 Tasklet 不能睡眠,因此需要加 spin lock 锁进行并发保护.

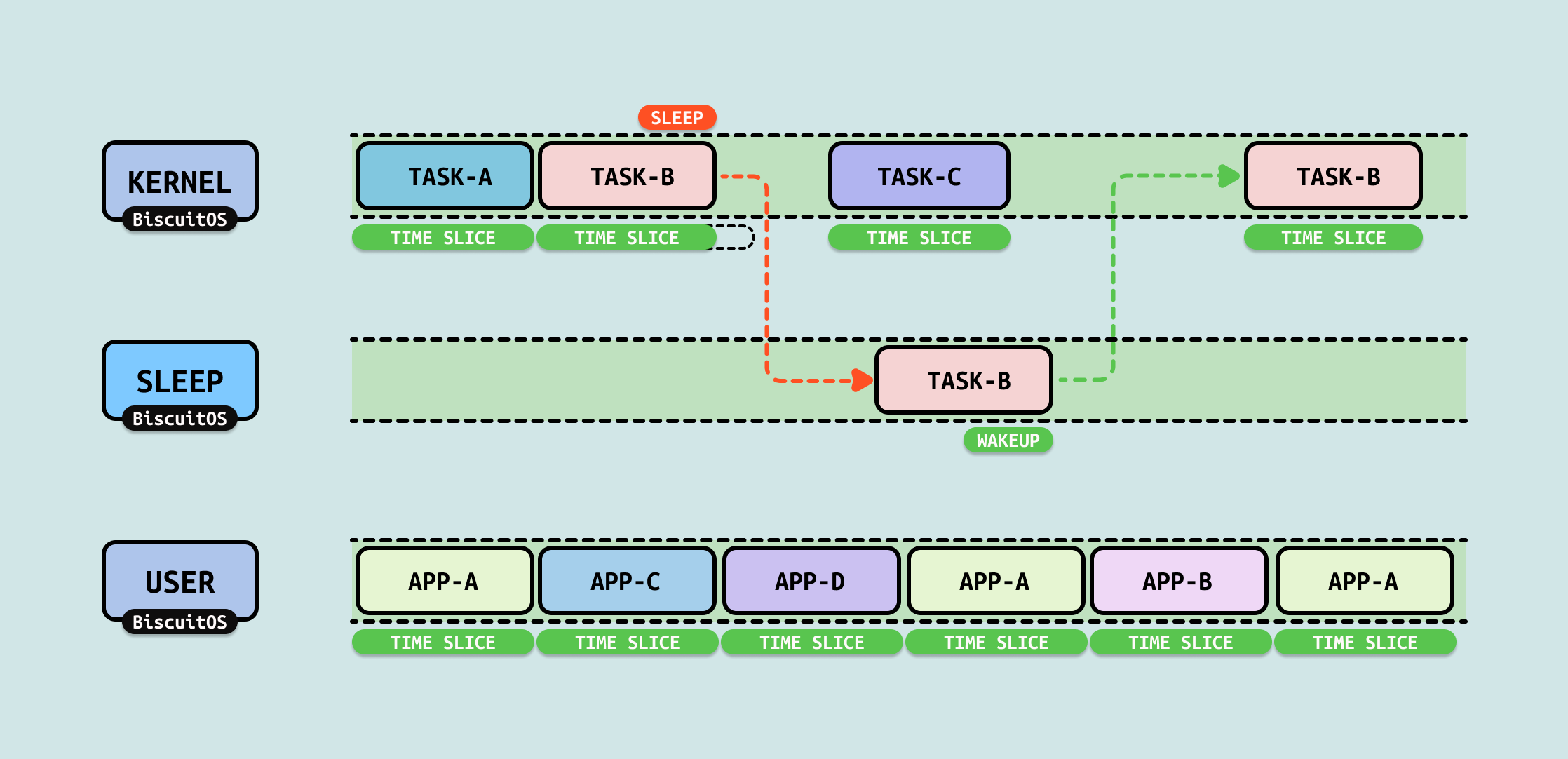
在研究 MUTEX 睡眠状态之前,先了解进程的状态. Linux 内核用 “task_struct” 的 “state” 字段记录进程状态, 可以使用 “ps/top” 工具查看进程的状态,具体包>括以下几种:
- R(TASK_RUNNING): 正在运行或在运行队列上
- S(TASK_INTERRUPTIBLE): 可中断的睡眠(可被信号唤醒)
- D(TASK_UNINTERRUPTIBLE): 不可中断的睡眠(无法被信号唤醒)
- T(TASK_STOPPED): 停止(如被 SIGSTOP 信号暂停)
- Z(EXIT_ZOMBIE): 僵尸进程(已退出,未被父进程回收)
- X(EXIT_DEAD): 死亡进程(极短暂,几乎看不到)

在内核中,自旋性锁是一类用于保护临界区、避免多核或多线程环境下数据竞争的同步机制,主要包括自旋锁(Spinlock)、读写自旋锁(RWLOCK) 和序列锁(SEQLOCK) 的写临界区。它们的共同特点是: 当一个线程尝试获取锁而发现锁已被其他线程持有时,并不会进入睡眠或阻塞状态,而是会在原地不停地循环检查锁的状态,直到锁被释放,这一过程被称为“自旋”(Spin)。自旋锁适合临界区很短、持锁时间极短的场景,否则会导致 CPU 资源浪费。RWLOCK 允许多个读者并发进入,但写者必须独占锁,写临界区同样采用自旋方式。SEQLOCK 的写操作也是通过自旋保护,确保写期间的数据一致性。总的来说,自旋型锁的最大特征就是通过自旋等待来实现高效的短时同步.
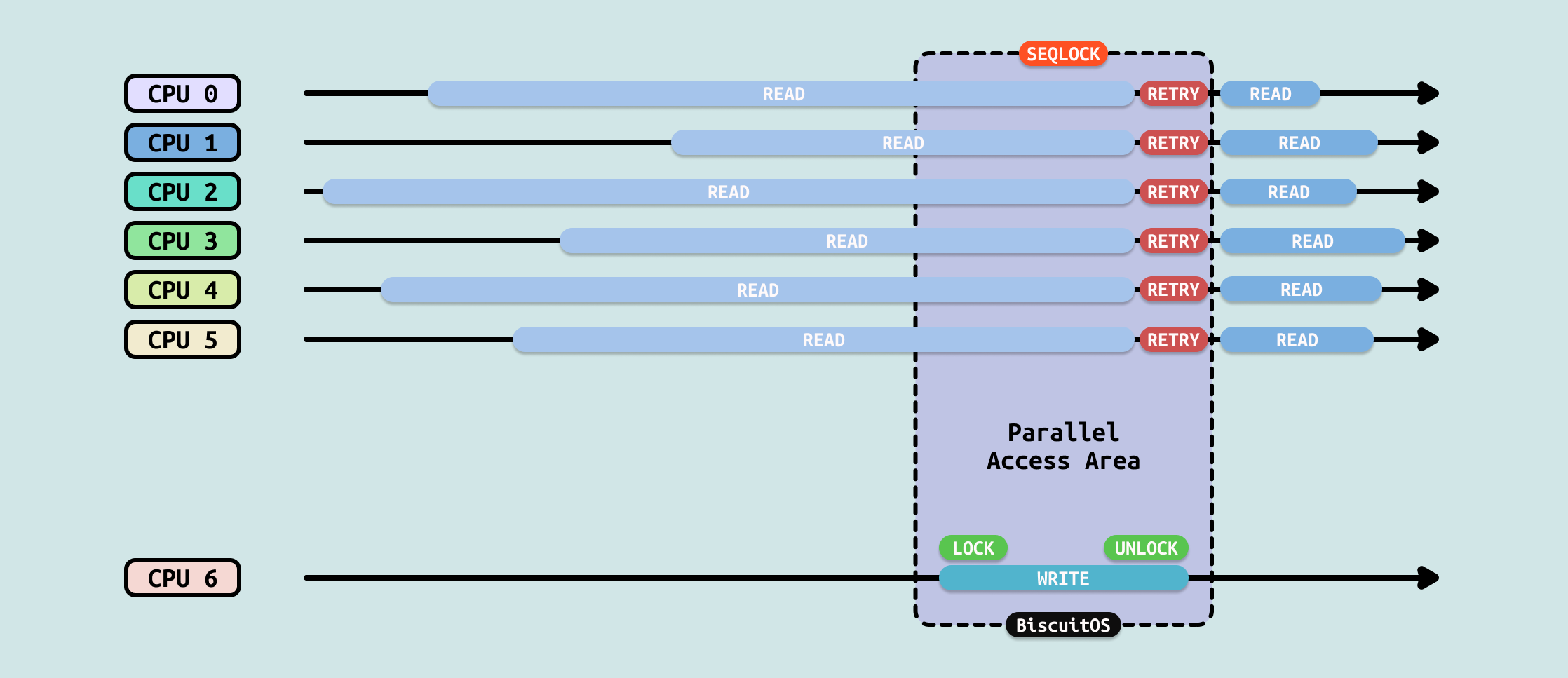
这三种自旋型锁在实现和用途上各有不同。自旋锁是最基础的自旋锁机制,只允许一个线程持有锁,适用于任何需要互斥保护的临界区。读写自旋锁(RWLOCK) 则在自旋锁基础上引入了读写分离的机制,允许多个线程同时以读模式持锁,提高了多读少写场景下的并发性; 但写线程获取锁时,依旧需要等待所有读线程释放锁。序列锁(SEQLOCK) 则主要用于写少读多的场景,其设计允许读者在没有加锁的情况下进行操作,通过递增的序列号检测写操作冲突,写者在写临界区内仍需自旋获取锁以确保原子性。相较之下,SEQLOCK 牺牲了部分读操作的实时性,换来了极高的读并发能力,适合对一致性要求可以接受的应用场景.
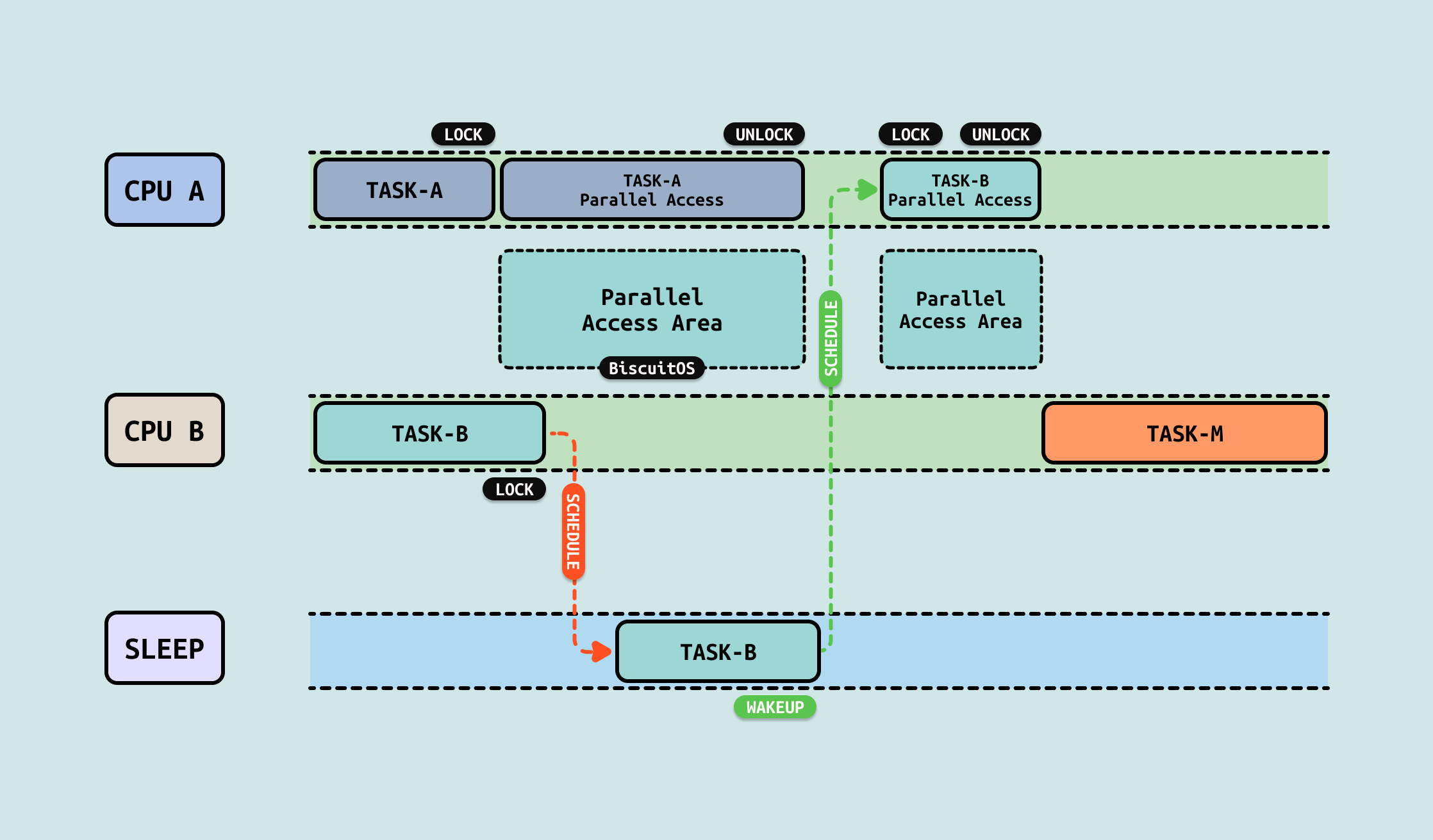
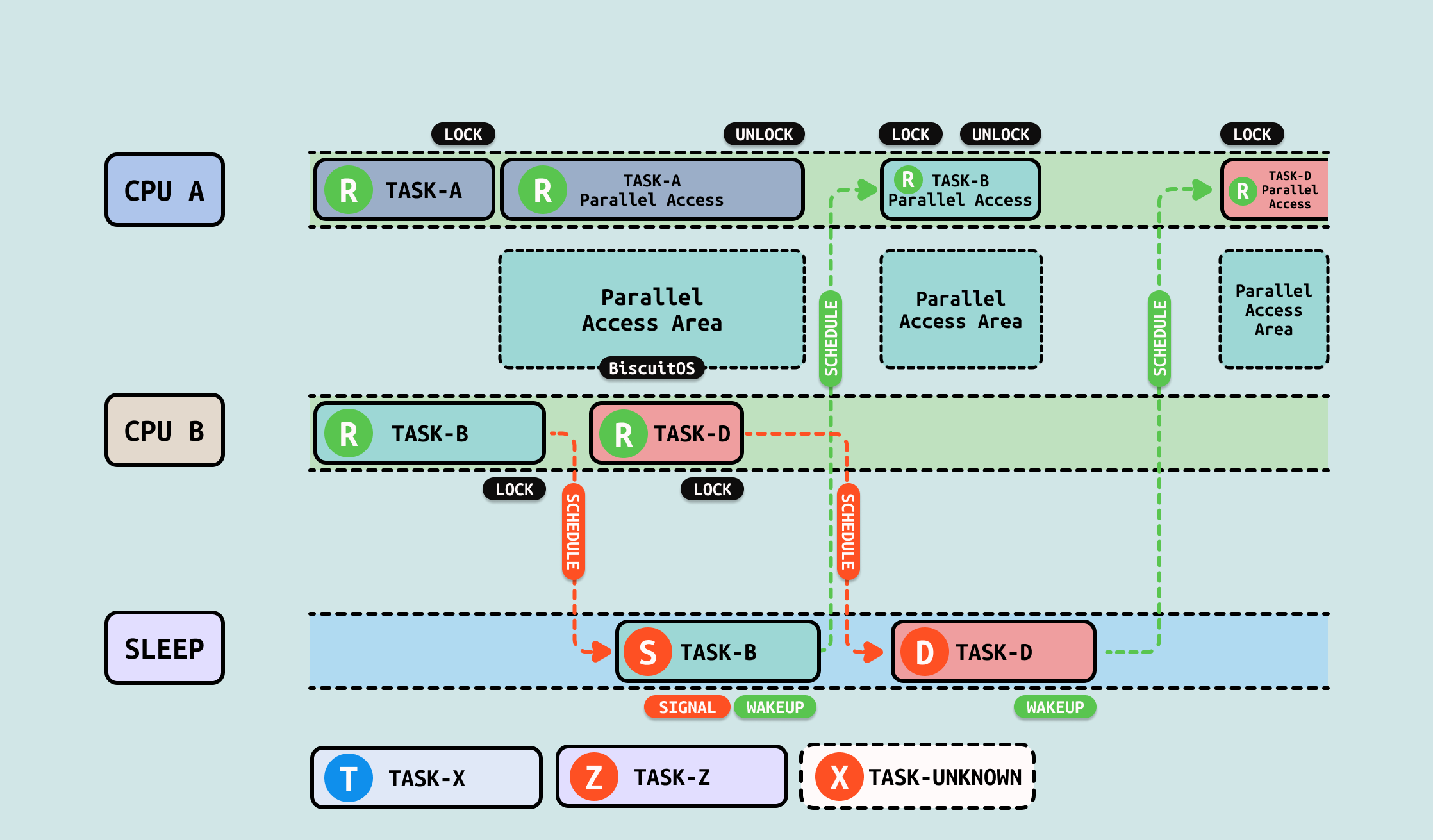
在内核中,可睡眠型锁是一类允许线程在获取不到锁时主动进入睡眠状态、释放 CPU 资源的同步机制,主要包括互斥锁(MUTEX)、信号量(SEMAPHORE) 和读写信号量(RW-SEMAPHORE)。它们的共同特点在于: 当线程尝试获取锁却发现锁已被占用时,不会像自旋型锁那样原地等待消耗 CPU,而是自动进入睡眠(阻塞)状态,直到锁被释放才会被唤醒。这不仅避免了 CPU 资源的浪费,也允许临界区内部执行可能导致睡眠的操作,如等待 I/O 或调度等。因此,可睡眠型锁广泛应用于临界区较大、持锁时间可能较长,且临界区内可能涉及阻塞或睡眠的场景,是内核高并发同步和资源调度的重要工具。
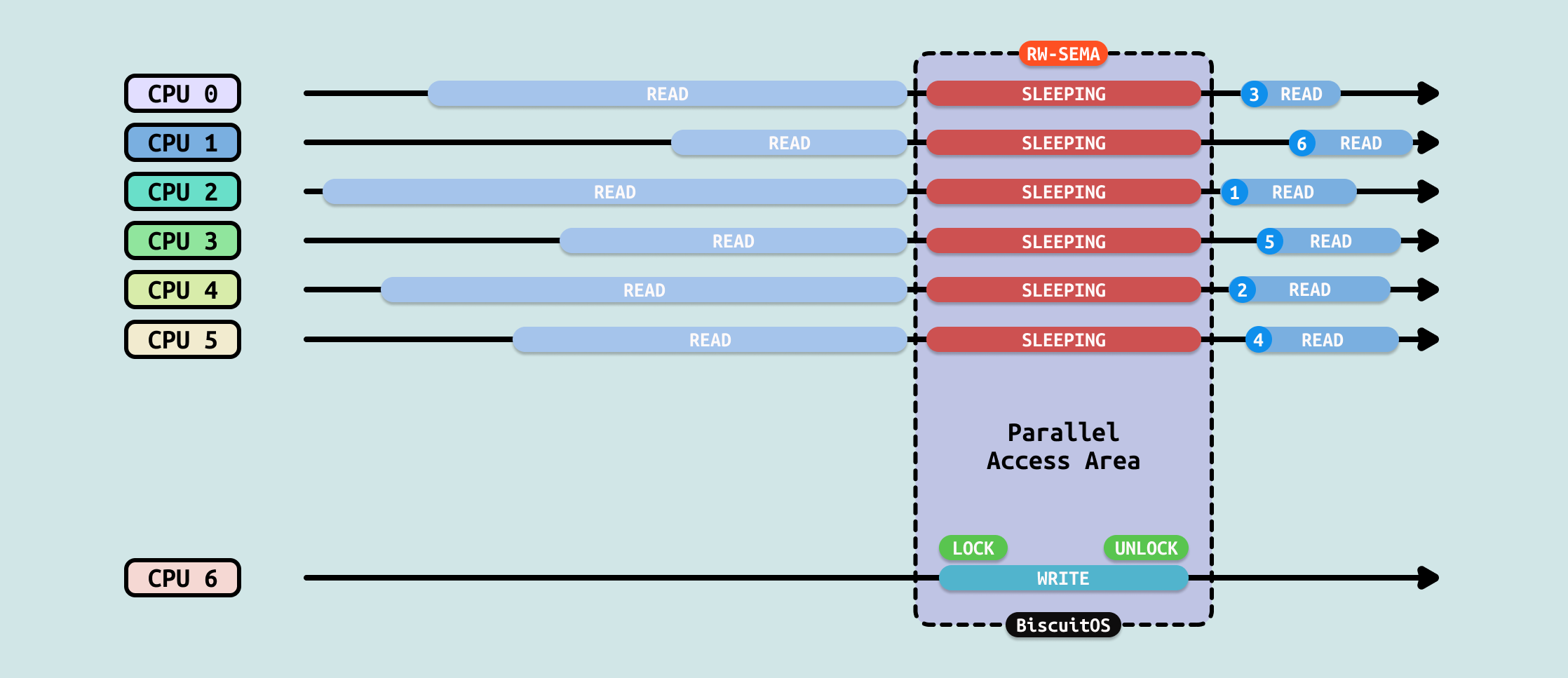
这三种可睡眠型锁在实现和用途上各有侧重。互斥锁(MUTEX) 是最基础的可睡眠锁,只允许一个线程持有,适合需要严格互斥且临界区可能阻塞的场合。信号量(SEMAPHORE) 则支持多个线程同时持有,常用于实现资源计数或允许”有限并发”的同步需求,比如控制对某类资源的最大访问者数量。读写信号量(RW-SEMAPHORE) 则进一步扩展,允许多个读线程同时获取锁,提高读多写少场景下的并发性,而写线程依旧需要独占锁。相较于自旋型锁,这些可睡眠型锁能够有效减少 CPU 占用,适用于那些临界区较大或不确定时长的复杂内核操作
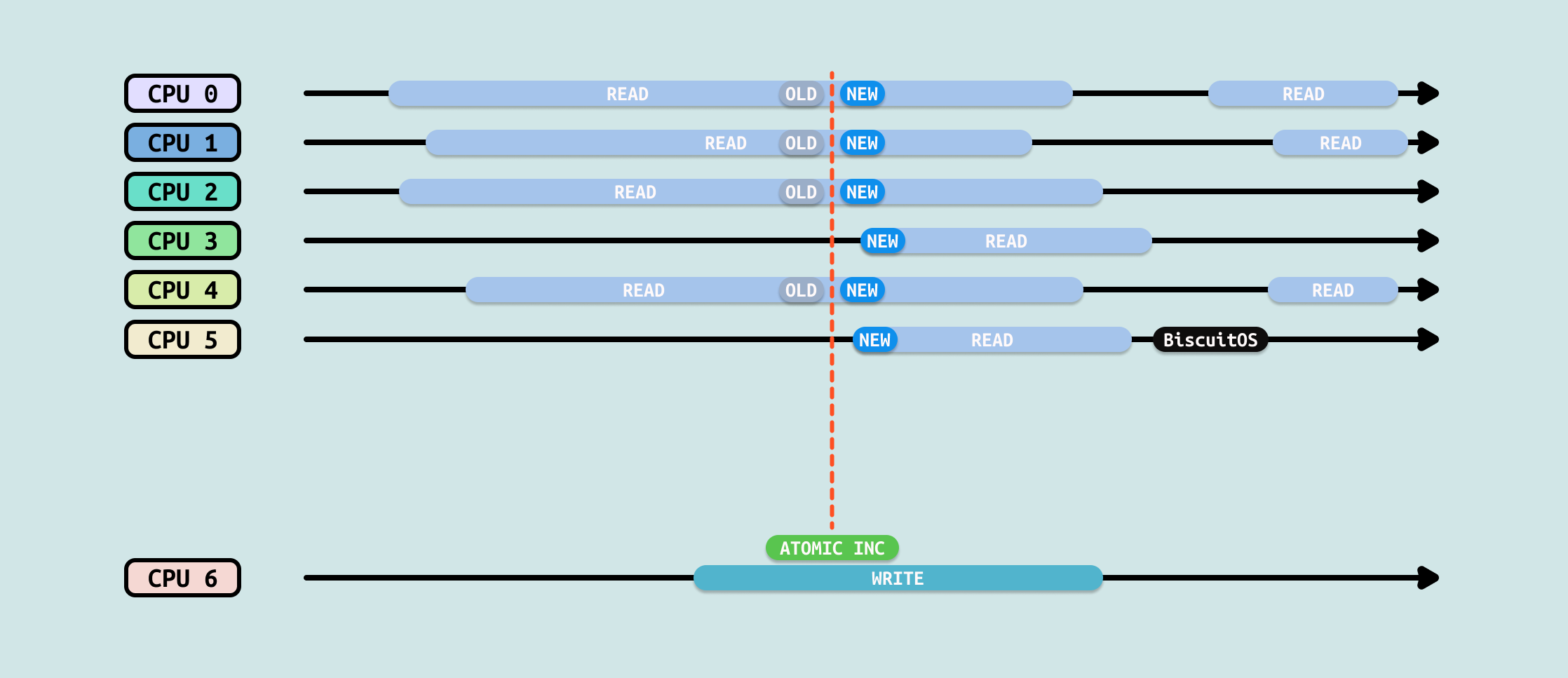
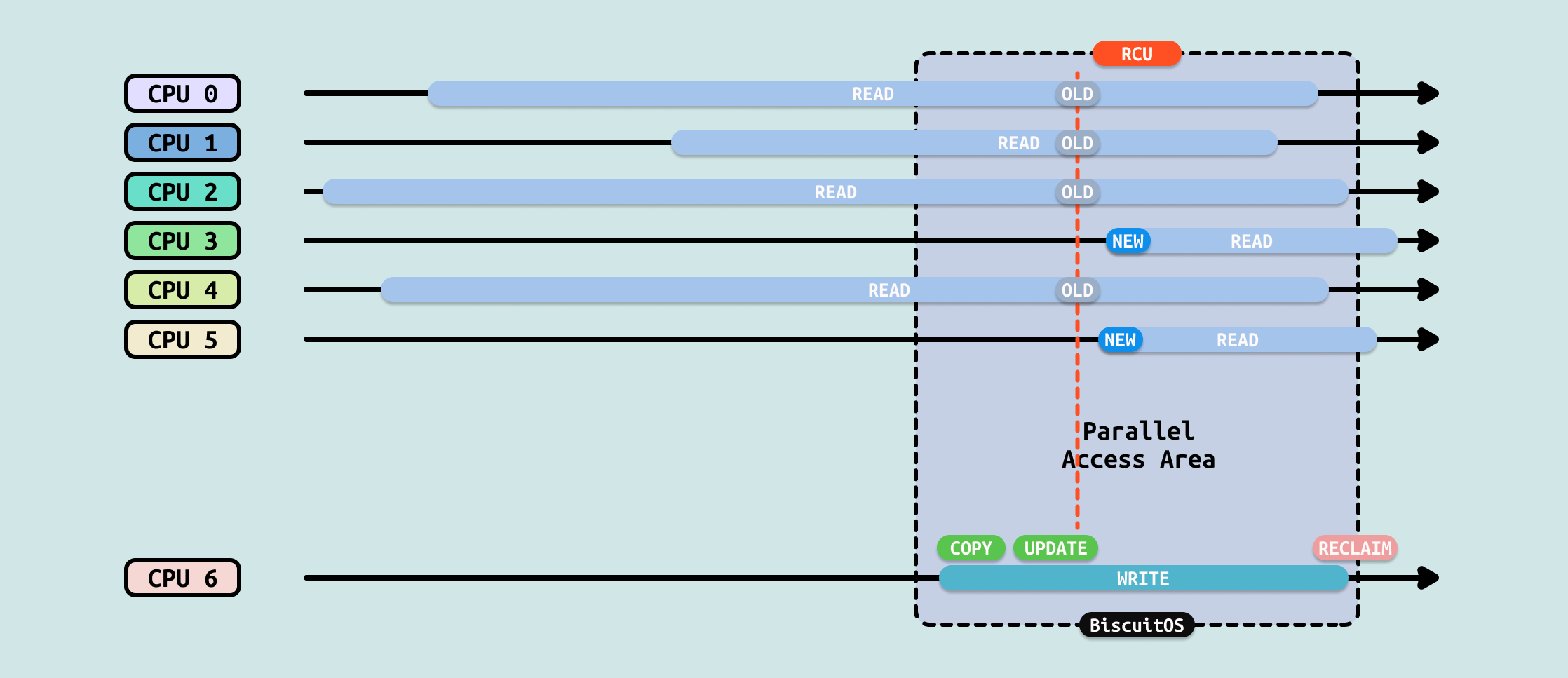
在内核中,读无锁型锁是一类专为高并发读操作设计的同步机制,主要包括 RCU(Read-Copy-Update)、SRCU(Sleepable RCU)和 SEQLOCK(序列锁)。它们的共同特点是: 读操作完全无锁,读者在访问共享数据时不需要加锁,因此不会相互阻塞,也不会被写者阻塞,极大提升了多线程环境下的读并发能力。同时,写者在更新数据时采用特殊机制,确保写操作期间读者依然可以安全、无等待地访问数据。这种机制尤其适用于读多写少的场景,比如内核中的路由表、文件系统元数据等,大幅度减少了锁竞争和性能瓶颈,是现代内核实现高效并发的关键技术之一。
这三种读无锁型锁在实现和用途上各具特色。RCU 通过”读时无锁、写时复制和延迟回收”机制,允许读者始终访问一致快照,写者则在后台异步更新和清理,非常适合需要频繁遍历、偶尔修改的大型共享数据结构。SRCU 是 RCU 的变种,允许读者在临界区中发生睡眠,适用于需要等待或阻塞操作的复杂读场景,如内核模块卸载与动态注册。SEQLOCK 则采用递增序列号的方式,写者持锁修改数据,读者无锁读取并通过比较序列号判断数据是否一致,适合对一致性要求灵活、写操作不频繁的场景。三者相比,RCU 和 SRCU 更注重读操作的实时性和一致性管理,而 SEQLOCK 则强调极致的读性能,适合对偶尔容忍重试和不严格一致性的应用.
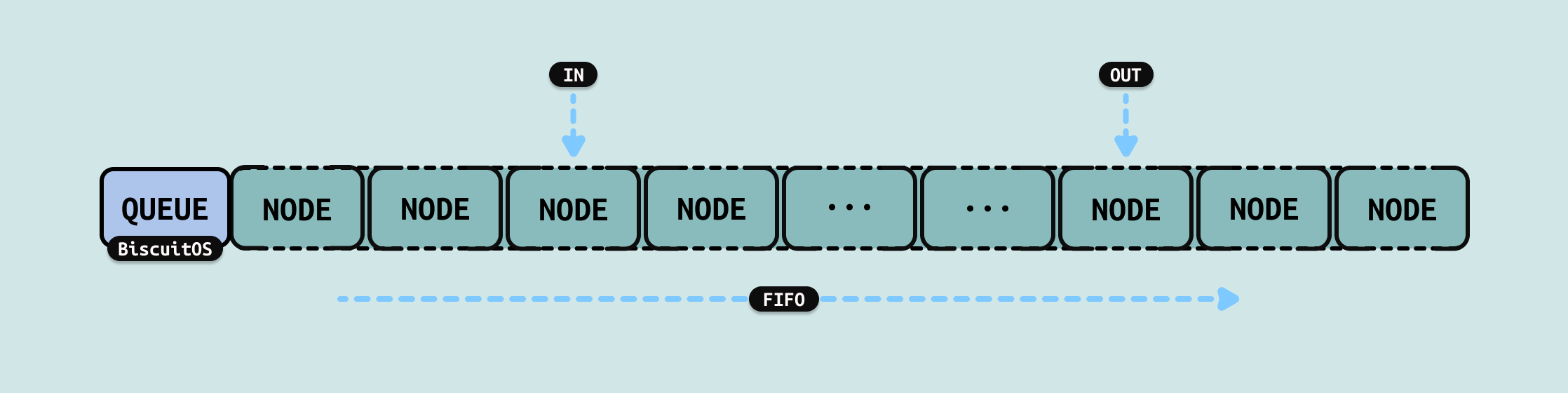
在内核中,无锁(Lockless) 同步机制是一类不依赖传统加锁手段,而是通过原子操作(如 Atomic)、内存屏障、以及无锁数据结构(如无锁队列、无锁 ringbuf、无锁 kfifo 等)实现线程安全的技术。其共同特点是多个线程可以并发地访问和操作共享数据,无需等待和阻塞。无锁机制通常利用硬件提供的原子指令(如 CAS、原子加减)和必要的内存屏障,确保并发修改时的数据一致性和操作顺序。由于所有操作都设计为”无等待”,在高并发环境下能极大减少上下文切换和锁竞争,提升系统吞吐量和响应速度,非常适合对性能要求极高的内核子系统和实时数据处理场景。
无锁机制具有显著的优缺点。其优点在于极高的并发能力和低延迟,避免了传统锁带来的自旋、阻塞和唤醒等性能损耗,从而显著提升多核环境下的效率。此外,无锁结构还能减少死锁、优先级反转等同步风险。然而,无锁算法通常实现复杂,对原子操作和内存模型的理解要求极高,容易出现难以察觉的竞态条件和 ABA 问题;同时,许多无锁结构在写操作冲突严重时可能出现活锁或频繁重试,影响系统稳定性。因此,无锁方案更适用于读多写少、操作高度可控、对性能极致追求的内核场景,而在复杂同步需求下仍需谨慎权衡使用。
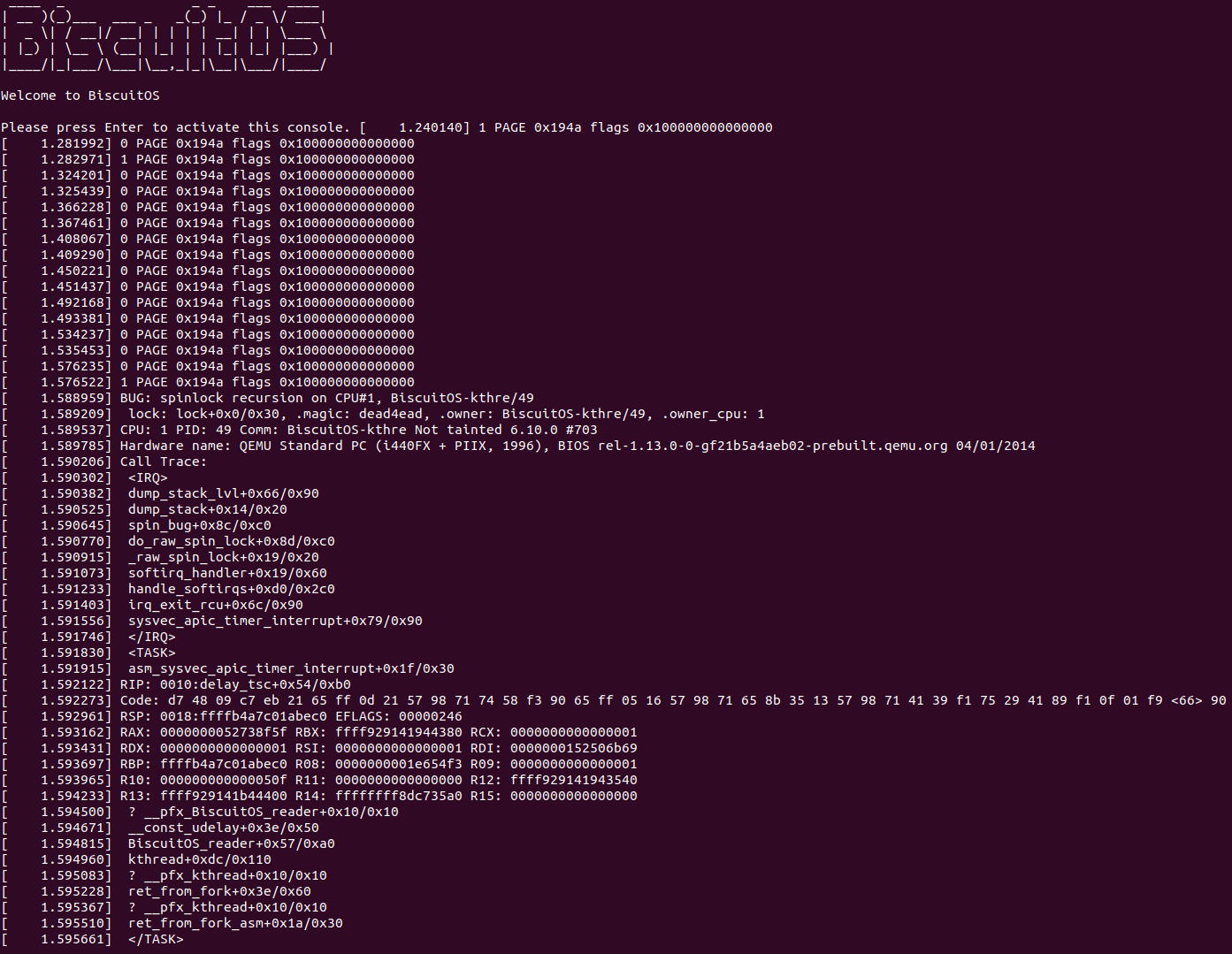
锁相关的 BUG 在内核开发中极为常见,主要包括死锁、活锁、优先级反转、递归加锁、未释放锁、错误的锁顺序等类型。这些 BUG 会导致系统出现资源无法释放、线程永久阻塞、系统响应变慢甚至崩溃等严重问题。更棘手的是,由于锁 BUG 通常只会在极端并发、特定时序或高负载下才暴露出来,导致其极难复现和定位。许多锁相关 BUG 只在特定硬件或内核配置下才会被触发,并且涉及多个线程、CPU 甚至中断上下文,调试过程复杂且耗时,因此成为内核稳定性维护中的一大难题。
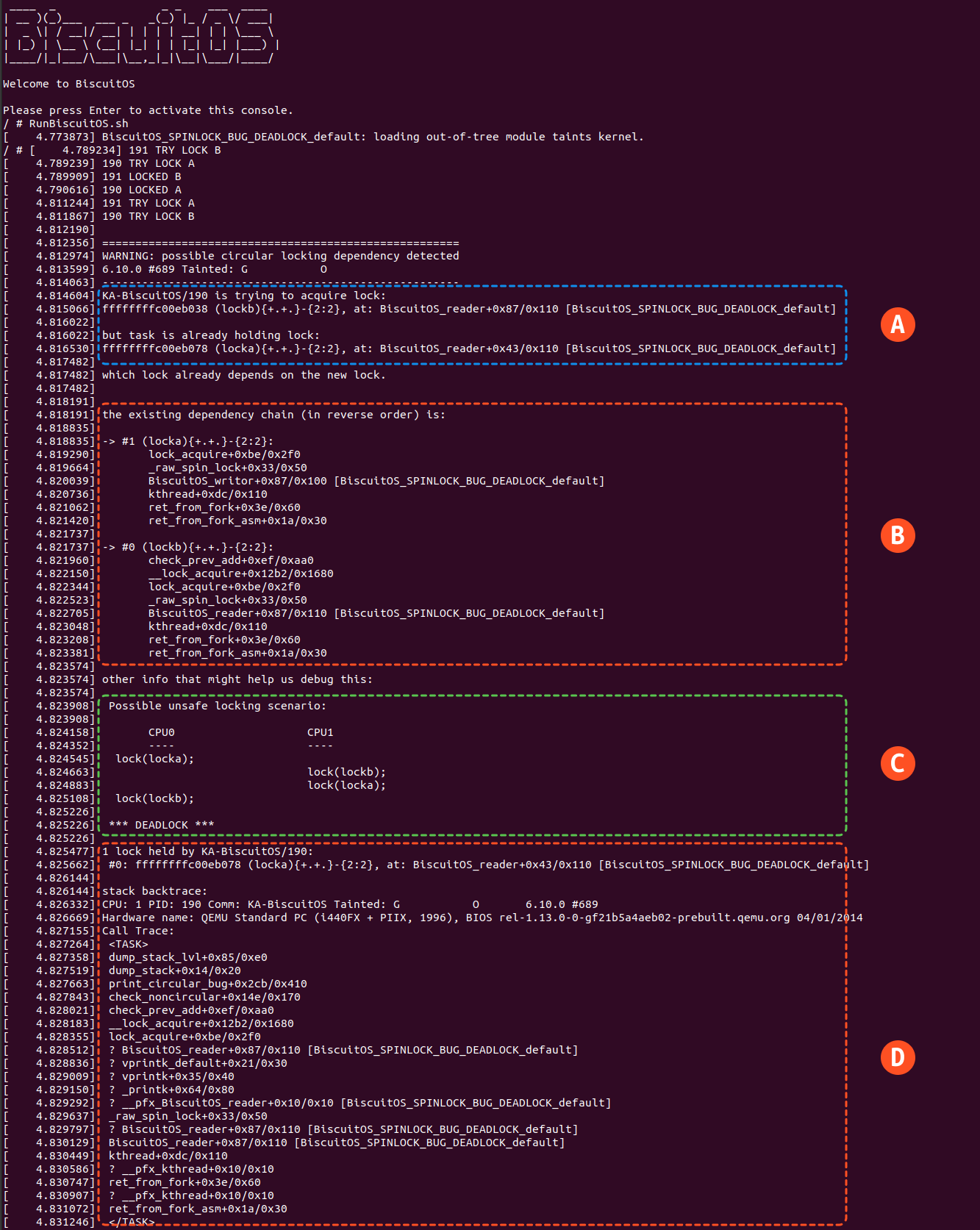
为帮助开发者分析和调试锁相关问题,Linux 内核提供了如 LOCKDEP(锁依赖分析器) 等强大的调试机制。LOCKDEP 能够动态跟踪和记录系统中各种锁的加锁、解锁顺序及依赖关系,自动检测可能的锁顺序反转和潜在死锁风险。开发者在开启 LOCKDEP 后,如果出现不合理的锁操作,系统会输出详细的错误日志和调用栈,有助于快速定位和修复问题。除此之外,内核还提供了诸如 lock_stat、spinlock_debug 等调试工具,协助分析锁的使用频率、争用点和性能瓶颈。这些机制大大提升了锁 BUG 的可观测性和调试效率,是保障内核可靠性的有力手段
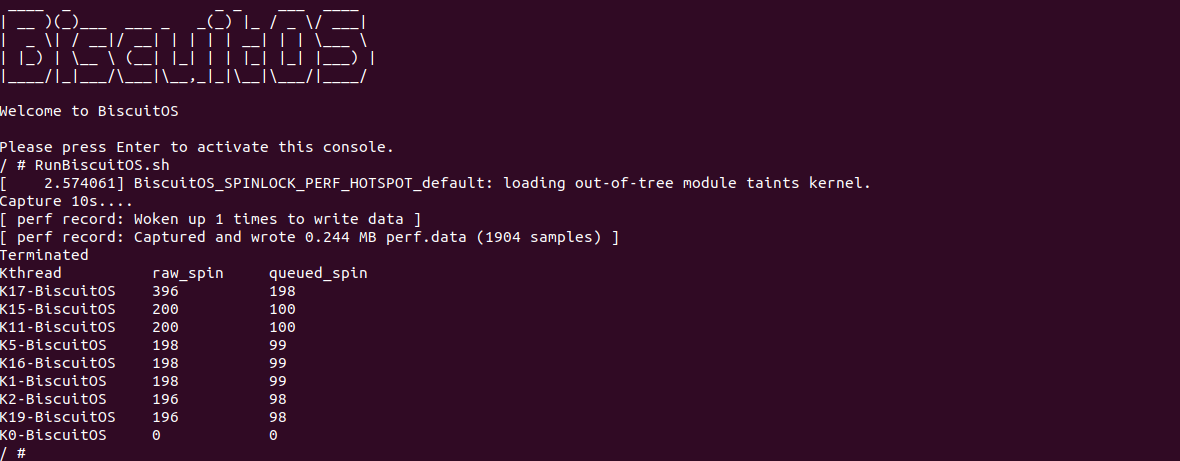
在内核开发和调优过程中,锁的性能分析至关重要。随着多核处理器和高并发应用的普及,锁的争用、持有时间和粒度直接影响系统整体性能。过度加锁或频繁争用会导致线程阻塞、CPU 利用率下降和吞吐量降低,甚至引发”锁竞争风暴”,限制系统扩展能力。通过性能分析,我们可以发现潜在的瓶颈点、优化锁的设计与使用方式,从而提升并发效率和响应速度,确保系统在高负载场景下依然保持良好的性能表现。因此,锁的性能分析已经成为内核性能优化的重要一环。
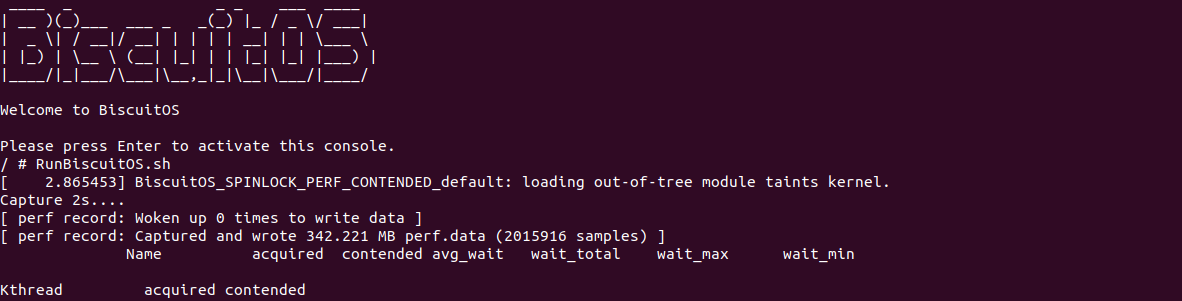
进行锁性能分析时,可借助多种内核工具。perf 能够实时统计锁的争用次数、持有时长及热点锁分布,帮助识别高争用锁和临界区瓶颈。kprobe 则可用于动态插桩,监控特定锁操作的调用时序和参数。此外,还可结合 ftrace、lock_stat 等工具,细致追踪锁的获取与释放路径。分析时需重点关注锁的争用频率、持锁时间、临界区代码复杂度、上下文切换次数及锁的嵌套关系等关键指标。通过这些数据,开发者可以有针对性地优化锁的粒度、重构临界区逻辑,提升系统整体并发性能。